








MÓDULO CONTROLADOR DE MOTORES 1 CANAL POLOLU TB9051FTG PUENTE H POLOLU
$13,99
Esta placa de ruptura facilita el uso del controlador de motor de CC cepillado TB9051FTG de Toshiba. Tiene un amplio rango de voltaje de funcionamiento de 4.5 V a 28 V y puede entregar un continuo 2.6 A. Un umbral de corte de corriente fija permite al TB9051 limitar la corriente máxima del motor, y cuenta con protección integrada contra condiciones de bajo voltaje, sobrecorriente y sobretemperatura; nuestra placa portadora también añade protección de voltaje inverso.
3 disponibles
Descripción
Visión general
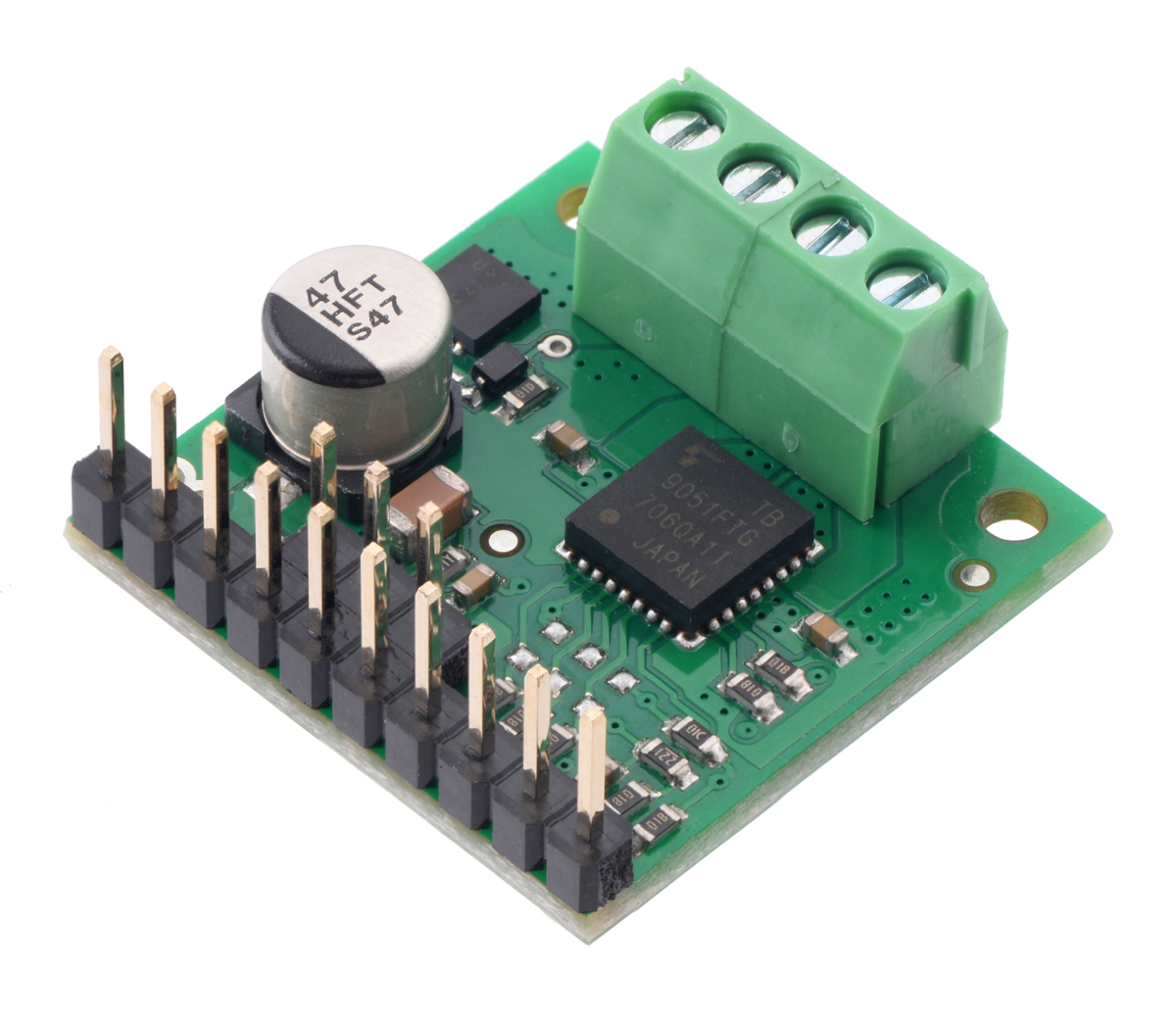
El TB9051FTG de Toshiba es un IC del controlador de motor de puente H que se puede utilizar para el control bidireccional de un solo motor de CC cepillado a 4,5 V a 28 V. Puede suministrar hasta aproximadamente 2.6 A continuamente, y puede entregar corrientes pico de hasta 5 A (típico) durante unos segundos. El TB9051FTG es un gran IC, pero su pequeño paquete de montaje en superficie hace que sea difícil de usar para el estudiante o aficionado típico; nuestra placa de ruptura hace que sea fácil de usar con placas de pan sin soldadura estándar y 0.1 “perfboards.
Dado que esta placa es una portadora para el TB9051FTG, recomendamos una lectura cuidadosa de la hoja de datos TB9051FTG. La placa se envía poblada con componentes SMD, incluyendo el TB9051FTG y un circuito de protección de batería inversa.
Para aquellos que necesitan controlar dos motores, también tenemos placas TB9051FTG de doble canal disponibles en los factores de forma de una placa de expansión Raspberry Pi y un escudo Arduino (la versión de escudo también está diseñada para funcionar como un controlador de motor dual de propósito general que se puede utilizar con otras placas de microcontrolador fuera del entorno Arduino).
Funciones
- Controlador de motor de puente H de un solo canal
- Tensión de alimentación del motor: 4.5 V a 28 V
- Corriente de salida: hasta 2,6 A continuo (pico de 5 A)
- La función de corte automático de corriente ayuda a evitar el sobrecalentamiento al reducir la potencia con gracia en lugar de apagarse bruscamente
- Bloqueo de bajo voltaje y protección contra sobrecorriente/cortocircuito y sobretemperatura
- La placa portadora añade protección de voltaje inverso
- La salida de error activa-baja indica la condición de sobrecorriente, sobretemperatura, bajo voltaje o sobretensión VCC
- Tamaño compacto (1,0″ a 1,0″)
- Almohadilla de tierra soldable expuesta debajo del IC del controlador en la parte inferior de la placa CI
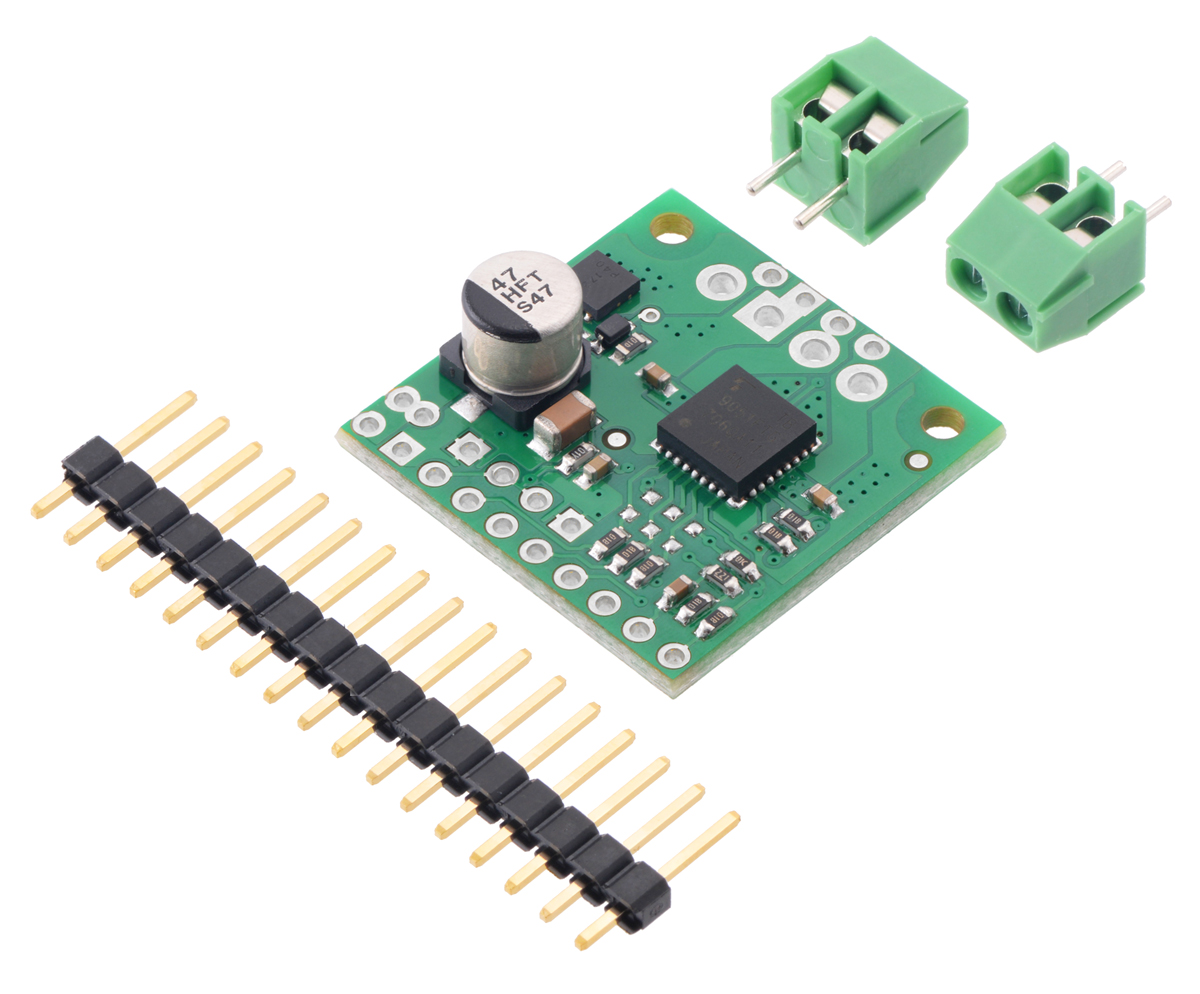
Hardware incluido
Este producto se suministra con todos los componentes de montaje en superficie, incluido el CI del controlador TB9051FTG, instalado como se muestra en la imagen del producto. Sin embargo, se requiere soldadura para el montaje de las piezas de orificio pasante incluidas: un cabezal macho de 1 x 17 pines de separación de 0,1″ y dos bloques de terminales de 2 pines y 3,5 mm (para la potencia de la placa y las salidas del motor).
El cabezal macho de 0,1″ se puede romper o cortar en trozos más pequeños como se desee y se suelda en los orificios pasantes más pequeños. Estos cabezales son compatibles con placas de pan sin soldadura, conectores hembra de 0,1″y nuestros cables de puente premium y pre-crimpados. Los bloques de terminales se pueden soldar en los orificios más grandes para permitir conexiones temporales convenientes de cables de alimentación y motor sin terminar (ver nuestro vídeo corto sobre la instalación de bloques de terminales). También puede soldar sus cables de motor y otras conexiones directamente a la placa para la instalación más compacta.
|
|
Uso del controlador del motor
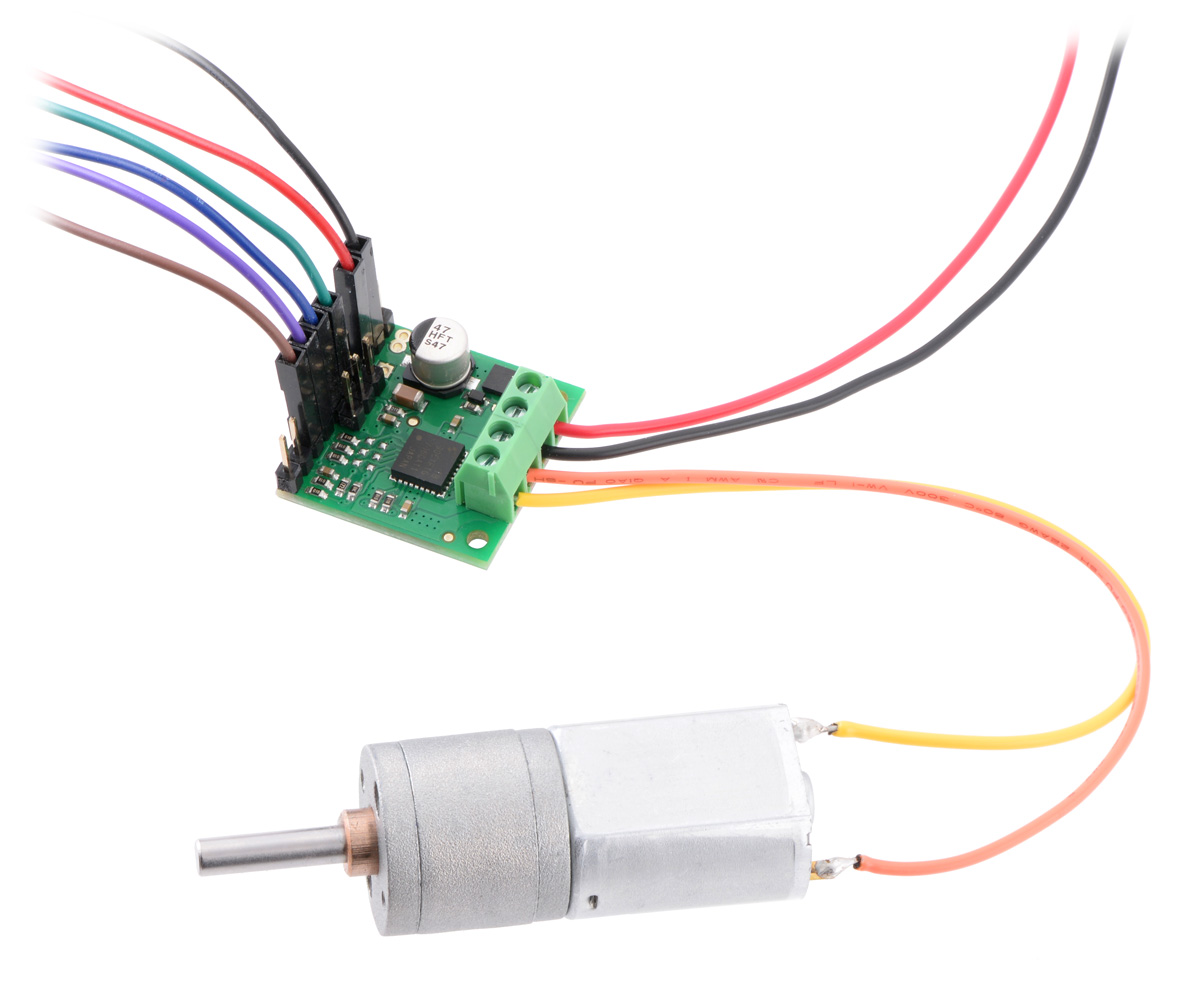 |
Las conexiones de motor y de potencia se realizan en un lado de la placa y las conexiones de control se realizan en el otro. El controlador requiere que se suministre una tensión de funcionamiento entre 4,5 V y 28 V a la entrada de alimentación protegida contra inversa, VIN, y una tensión lógica regulada de 5 V que se suministrará a VCC. El pin VM proporciona un acceso conveniente a la tensión del motor de protección inversa.
Para la operación de freno de accionamiento (también conocido como decaimiento lento) con dos líneas de control compatibles con PWM, los estados predeterminados de los pines de habilitación se pueden invalidar (en atado alto y ENB atado bajo) para permitir el controlador; los pines adyacentes VCC y GND proporcionan lugares convenientes para realizar estas conexiones. Los dos pines PWM controlan el estado de las salidas correspondientes (frecuencia PWM de hasta 20 kHz), como se muestra en la siguiente tabla de verdad simplificada:
| TB9051FTG tabla de verdad simplificada (PWM1 + PWM2) | ||||||
|---|---|---|---|---|---|---|
| Entradas | Salidas | Operación | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| 1 | 0 | Pwm | 0 | PWM (H/L) | L | avance/freno a velocidad PWM % |
| 0 | Pwm | L | PWM (H/L) | marcha atrás/freno a velocidad PWM % | ||
| 0 | 0 | L | L | freno bajo (salidas cortas a tierra) | ||
| 1 | 1 | L | L | |||
| 0 | X | X | X | Z | Z | costa (salidas flotantes/desconectadas) |
| X | 1 | X | X | Z | Z | |
Alternativamente, puede mantener PWM1 y PWM2 en niveles fijos para establecer la dirección del motor y aplicar una señal PWM a EN (o una señal PWM invertida a ENB) para establecer la velocidad, lo que resulta en la operación drive-coast (también conocida como decaimiento rápido). Esto aumenta el número de líneas de E/S a tres, pero solamente una de ellas necesita ser PWM-capaz, tal y como se muestra en de esta tabla de la verdad simplificada:
| TB9051FTG tabla de verdad simplificada (PWM1 + PWM2 + EN) | ||||||
|---|---|---|---|---|---|---|
| Entradas | Salidas | Operación | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| Pwm | 0 | 1 | 0 | PWM (H/Z) | PWM (L/Z) | adelante/costa a velocidad PWM % |
| 0 | 1 | PWM (L/Z) | PWM (H/Z) | invertir/costa a velocidad PWM % | ||
| 0 | X | X | X | Z | Z | costa (salidas flotantes/desconectadas) |
| X | 1 | X | X | Z | Z | |
Sin embargo, tenga en cuenta que este segundo método restringe las frecuencias PWM utilizables con el controlador: las salidas del motor en el TB9051FTG tienen un tiempo de apagado mínimo de unos 80 microsegundos cuando se apagan con EN o ENB, lo que limita el ciclo de trabajo máximo alcanzable y hace que las frecuencias PWM por encima de unos pocos kilohercios en su mayoría no sean prácticas. Por ejemplo, a 1,25 kHz, cada período de PWM tiene una longitud de 800 s; si las salidas están apagadas durante al menos 80 s, el ciclo de trabajo máximo alcanzable es del 90%.)
El TB9051FTG impulsa su pin DIAG bajo cada vez que se produce una condición de bajo voltaje, sobretensión VCC, sobretemperatura o sobrecorriente. DIAG también será bajo cada vez que cualquiera de los pines de habilitación esté deshabilitando el controlador (ambos deshabilitan el controlador de forma predeterminada). De lo contrario, durante el funcionamiento normal, la placa tira de DIAG hasta VCC.
Los errores de sobretemperatura se bloquean, por lo que las salidas del motor permanecerán apagadas y el pin DIAG permanecerá afirmado hasta que se borre el fallo alternando uno de los pines de activación o desconectando la alimentación del controlador. Después de un error de sobrecorriente, el comportamiento del controlador depende del estado del pin OCC: si OCC es bajo (predeterminado), las salidas permanecen deshabilitadas hasta que se borra el error, pero si OCC es alto, el controlador intentará reanudar automáticamente la operación después de un tiempo de intemp-hora fijo (normalmente 500 ms). Independientemente del estado de OCC, el pin DIAG permanece afirmado después de un error de sobrecorriente hasta que se borra el error.
Los errores de sobretensión y sobretensión VCC no se bloquean (el conductor liberará el pin DIAG y volverá a funcionar tan pronto como se corrija la tensión). Una excepción es si el controlador detecta un voltaje anormal en el arranque; en este caso, continuará afirmando DIAG hasta que se borre el fallo, aunque seguirá permitiendo el funcionamiento normal mientras tanto si no hay otras condiciones de falla activas.
Pinout
 |
| Diagrama de pinout del portador de controlador de motor de CC cepillado único TB9051FTG. |
|---|
Los estados predeterminados de algunos de los pines de entrada lógica TB9051FTG requieren que se realicen conexiones externas para utilizar este controlador de motor. Para reducir el número de conexiones externas necesarias, la placa tiene tres ubicaciones donde una entrada se puede saltar a un pin adyacente para invalidar el valor predeterminado. Los puentes OCC y EN que reemplazan por defecto proporcionan conexiones a VCC, mientras que el puente ENB proporciona una conexión a GND. Las almohadillas de puente VCC son círculos; la almohadilla del puente de tierra es cuadrada.
| anclar | Estado predeterminado | Descripción |
|---|---|---|
| Vin | Entrada de fuente de alimentación de placa de 4,5 V a 28 V protegida contra marcha atrás. | |
| Gnd | Puntos de conexión a tierra para el motor y los suministros lógicos. La fuente de control y el conductor del motor deben compartir un terreno común. | |
| Vm | Estos pines dan acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el esquema de la placa a continuación). Se pueden utilizar para suministrar energía de protección inversa a otros componentes del sistema. La máquina virtual está generalmente diseñada como una salida, pero también se puede utilizar para suministrar energía de la placa, y algunos de los orificios VM y GND están espaciados para la adición de un condensador de orificio pasante opcional. | |
| OUT1 | Salida del motor 1. | |
| OUT2 | Salida del motor 2. | |
| VCC | Entrada de alimentación lógica de 5 V. | |
| Occ | Bajo | Entrada de configuración de respuesta sobrecorriente: de forma predeterminada, el controlador permanece deshabilitado después de una condición de sobrecorriente, pero si OCC es alto, automáticamente intenta reanudar la conducción después de un breve retraso en su lugar. |
| EN | Bajo | Habilitar entrada: cuando EN es bajo, OUT1 y OUT2 se establecen en alta impedancia. PWM se puede aplicar a este pin (normalmente hecho con ENB bajo y PWM1 o PWM2 alto). El valor predeterminado es que ambos pines de habilitación deshabiliten el controlador. |
| ENB | Alto | Entrada de activación invertida: cuando ENB es alta, OUT1 y OUT2 se establecen en alta impedancia. El PWM invertido se puede aplicar a este pin (normalmente hecho con EN alto y PWM1 o PWM2 alto). El valor predeterminado es que ambos pines de habilitación deshabiliten el controlador. |
| PWM1 | Bajo | Entrada de control/PWM para OUT1. |
| PWM2 | Bajo | Entrada de control/PWM para OUT2. |
| OCM | Salida del monitor de corriente: este pin proporciona un voltaje de realimentación de corriente analógica de aproximadamente 500 mV por amplificador (sólo activo mientras el puente H está conduciendo) a través de un filtro RC a bordo. | |
| Diag | Alto | Salida de error de diagnóstico: conducido bajo cuando se han producido ciertos errores o cuando el controlador está deshabilitado por las entradas EN o ENB. De lo contrario, la placa tira de este pin hasta VCC. |
Detección de corriente
La salida del monitor de corriente, OCM, proporciona un voltaje de realimentación de corriente analógica de aproximadamente 500 mV por A. Tenga en cuenta que esta salida sólo está activa mientras el puente H está conduciendo; está inactivo (bajo) cuando el conductor está frenando o la salida del motor es de alta impedancia (flotante). Si el conductor está frenando, la corriente seguirá circulando a través del motor, pero la tensión en el pasador OCM no reflejará con precisión la corriente del motor. Tenga en cuenta que, al igual que la mayoría de los controladores de motor con sentido de corriente integrado, la sensibilidad real puede variar significativamente de una unidad a otra, y la precisión puede ser especialmente deficiente a bajas corrientes. Por favor considere nuestros sensores de corriente de efecto Hall como opciones para agregar detección de corriente más consistente y precisa a su sistema.
Consideraciones de disipación de energía en el mundo real
El TB9051FTG comenzará a cortar su corriente de salida en un umbral típico de 6.5 A. Sin embargo, el chip por sí mismo normalmente se sobrecalentará a las corrientes más bajas. En nuestras pruebas, encontramos que el chip era capaz de entregar 5 A durante sólo unos segundos antes de que la protección térmica del chip entrara en acción; una corriente continua de aproximadamente 2,6 A fue sostenible durante muchos minutos sin desencadenar la limitación de la corriente térmica o un apagado por sobretemperatura. La corriente real que puede entregar dependerá de lo bien que pueda mantener el controlador del motor fresco. La placa de circuito impreso del portador está diseñada para ayudar con esto extrayendo calor del chip del conductor del motor. PWMing el motor introducirá calefacción adicional proporcional a la frecuencia.
A diferencia de los puentes H típicos, el TB9051FTG tiene una característica que le permite reducir con gracia el límite máximo de corriente cuando la temperatura del chip se acerca a su límite. Esto significa que si empuja el chip cerca de su límite, verá menos energía al motor, pero podría permitirle evitar un apagado completo.
Este producto puede calentarse lo suficiente como para quemarte mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Diagrama esquemático
 |
| Diagrama esquemático del portador de controlador de motor de CC cepillado único TB9051FTG. |
|---|

Valoraciones
No hay valoraciones aún.