

")
")
")

")

MOTORREDUCTOR POLOLU METÁLICO 25D*52L MM HP 6V 20,4:1 #1572 POLOLU
$39,99
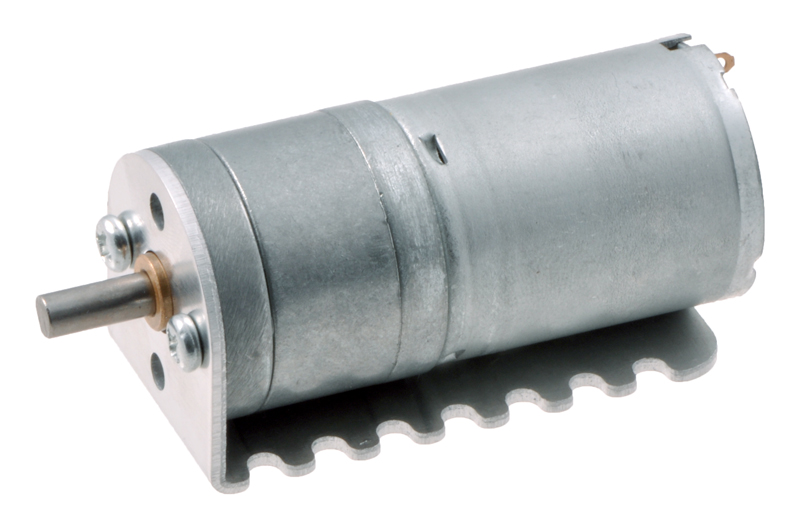
Este motor de engranajes consiste en un motor de CC cepillado de alta potencia de 6 V combinado con una caja de cambios de espolón de metal 20.4:1. El motor de engranajes es cilíndrico, con un diámetro inferior a 25 mm, y el eje de salida en forma de D tiene 4 mm de diámetro y se extiende 12,5 mm desde la placa frontal de la caja de cambios. Este motor de engranajes también está disponible con un codificador integrado.
Especificaciones clave:
| Voltaje | rendimiento sin carga | estancar la extrapolación |
|---|---|---|
| 6 V | 460 RPM, 550 mA | 5,5 kg⋅cm (75 oz⋅in), 6,5 A |
2 disponibles
Descripción
Visión general
Estos motores de CC cepillados cilíndricos están disponibles en una amplia gama de relaciones de engranajes y con cinco motores diferentes (dos niveles de potencia de motores de 6 V y tres niveles de potencia de motores de 12 V). Todos los reductores tienen la misma caja de 25 mm de diámetro y el eje de salida de la caja de cambios de 4 mm de diámetro, por lo que generalmente es fácil cambiar una versión por otra si cambian los requisitos de diseño (aunque la longitud de la caja de cambios tiende a aumentar con la relación de engranajes). Cada versión también está disponible opcionalmente con un codificador de cuadratura 48 CPR integrado. Consulte la tabla de comparación de motores de engranajes metálicos 25D para conocer las especificaciones detalladas de todos nuestros motores de engranajes metálicos 25D. Esta tabla dinámicamente clasificable puede ayudarle a encontrar la versión que ofrece la mejor combinación de velocidad, par y dibujo actual para su aplicación en particular. Una tabla de comparación más básica está disponible a continuación:
| Tensión nominal |
Tipo de motor | Estancamiento
de corriente – Voltaje nominal |
Velocidad sin carga – Voltaje nominal |
Par de establo aproximado – Voltaje nominal |

Con encoder |

Sin codificador |
|---|---|---|---|---|---|---|
| 6 V | alta potencia (HP) |
6.5 A | 10.000 RPM | 5 oz-in | 1:1 HP 6V w/encoder | |
| 2150 RPM | 20 oz-in | 4.4:1 HP 6V w/codificador | 4.4:1 HP 6V | |||
| 990 RPM | 39 oz-in | 9.7:1 HP 6V w/codificador | 9.7:1 HP 6V | |||
| 460 RPM | 75 oz-in | 20.4:1 HP 6V w/encoder | 20.4:1 HP 6V | |||
| 280 RPM | 90 oz-in | 34:1 HP 6V w/encoder | 34:1 HP 6V | |||
| 200 RPM | 115 oz-in | 47:1 HP 6V w/encoder | 47:1 HP 6V | |||
| 130 RPM | 150 oz-in | 75:1 HP 6V w/encoder | 75:1 HP 6V | |||
| 97 RPM | 210 oz-in | 99:1 HP 6V w/encoder | 99:1 HP 6V | |||
| 56 RPM | 350 oz-in | 172:1 HP 6V w/codificador | 172:1 HP 6V | |||
Nota: Los motores de engranajes que se detienen o sobrecargan pueden disminuir considerablemente su vida útil e incluso provocar daños inmediatos. Para estas cajas de cambios, el límite superior recomendado para par instantáneo es de 15 kg-cm (200 oz-in); recomendamos encarecidamente mantener las cargas aplicadas muy por debajo de este límite. Los establos también pueden resultar en daños térmicos rápidos (potencialmente en el orden de un segundo) en los bobinados y cepillos del motor, especialmente para las versiones que utilizan motores de alta potencia (HP); una recomendación general para el funcionamiento del motor de CC cepillado es del 25% o menos de la corriente del establo.
En general, este tipo de motores pueden funcionar a voltajes por encima y por debajo de sus voltajes nominales (pueden comenzar a girar a voltajes tan bajos como 1 V); voltajes más bajos podrían no ser prácticos, y voltajes más altos podrían comenzar afectando negativamente la vida del motor.
Detalles de la #1572 de artículos
Relación de transmisión exacta: 20.4:1
Dimensiones
El diagrama siguiente muestra las dimensiones de la línea de motores de engranajes de 25D mm (las unidades son mm sobre [pulgadas]).
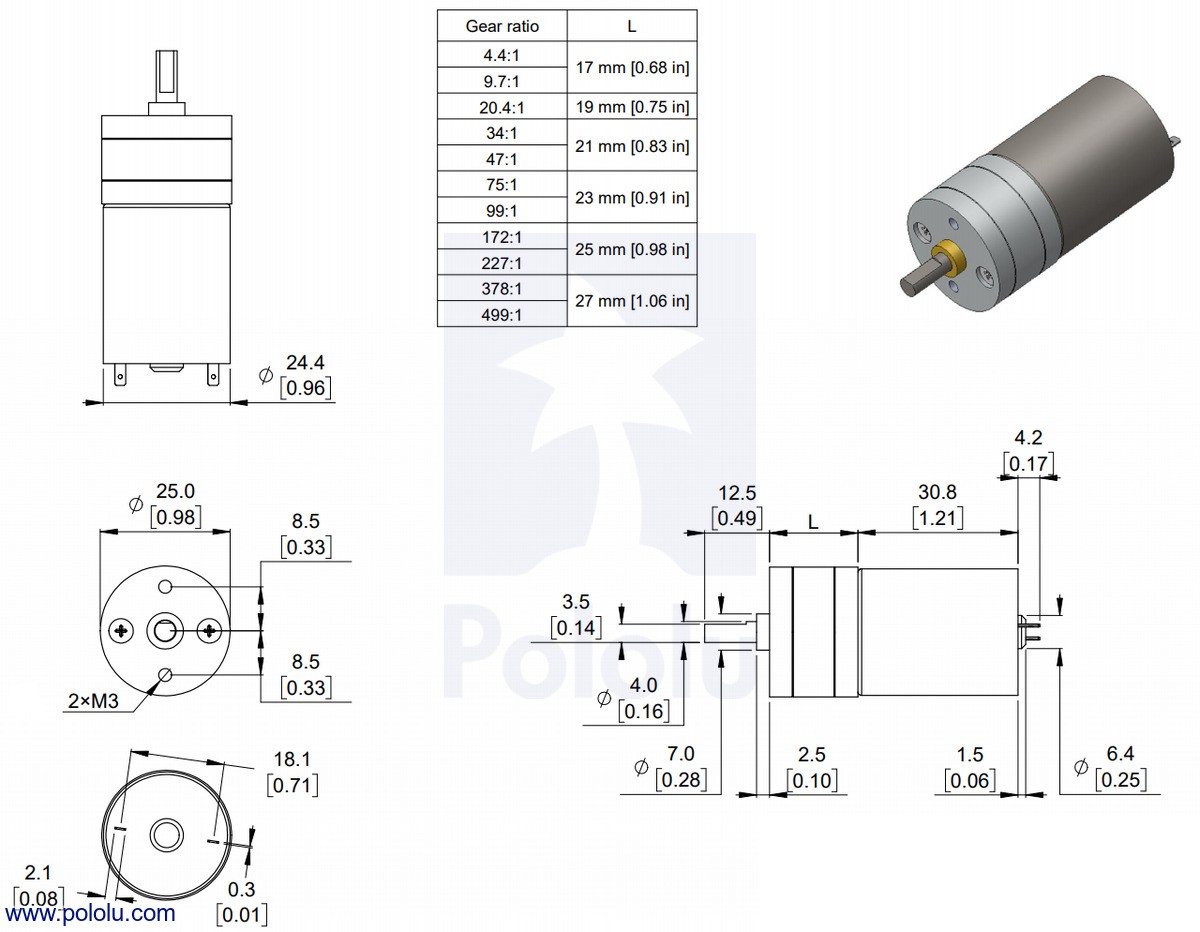 |
| Dimensiones de los motores de metal Pololu de 25D mm sin encoders. Las unidades son mm sobre [pulgadas]. |
|---|
Advertencia: No atornille demasiado en los orificios de montaje, ya que los tornillos pueden golpear los engranajes. Recomendamos atornillar no más de 6 mm (0,24″) en el orificio del tornillo.
Accesorios Gearmotor
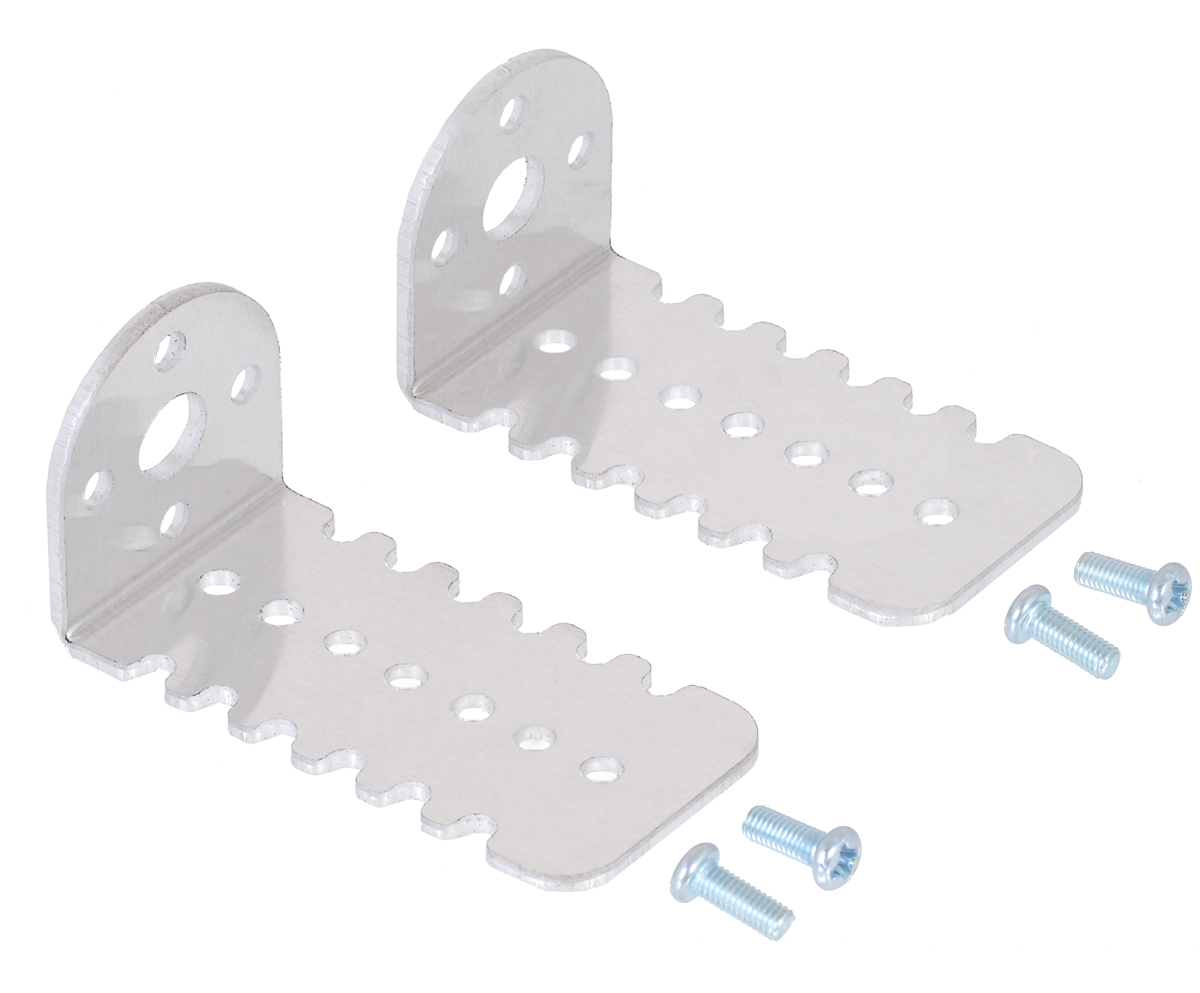
La placa frontal tiene dos orificios de montaje roscados para tornillos M3. Puede utilizar nuestro soporte reductor de metal de 25D mm diseñado a medida (que se muestra en la imagen de abajo) para montar el motor de engranajes en su proyecto a través de estos orificios de montaje y los tornillos que vienen con el soporte.
|
|
El eje de salida de la caja de cambios de 4 mm de diámetro funciona con ruedas Pololu multi-hub como se muestra en la imagen izquierda de abajo. Ese eje también funciona con el cubo de montaje de aluminio universal Pololu para ejes de 4 mm,que se puede utilizar para montar nuestras ruedas Pololu más grandes (60 mm-, 70 mm- y 80 mm de diámetro) o ruedas y mecanismos personalizados para el eje de salida de la motormotora como se muestra en la imagen derecha a continuación.
|
|


Alternativamente, puede utilizar nuestro adaptador de rueda scooter de 4 mm para montar muchas ruedas comunes de patinete scooter, skateboard y skate en línea en el eje de salida del motor de engranajes como se muestra en la imagen izquierda de abajo. Para un adaptador hexagonal de uso general, considere nuestro adaptador de rueda hexagonal de 12 mm,que le permite utilizar este motor con muchas ruedas RC hobby comunes como se muestra en la imagen derecha de abajo.
|
|


Estos son el mismo tipo de motores utilizados en el chasis todoterreno Wild Thumper, por lo que el eje de salida de la caja de cambios también funciona directamente con los adaptadores hexadecimales incluidos con las ruedas Wild Thumper de 120 mm de diámetro, como se muestra en la imagen de abajo:
 |
| Rueda Dagu Wild Thumper de 120 x 60 mm (rojo metálico) y motor de engranajes metálico Pololu de 25D mm con encoder. |
|---|
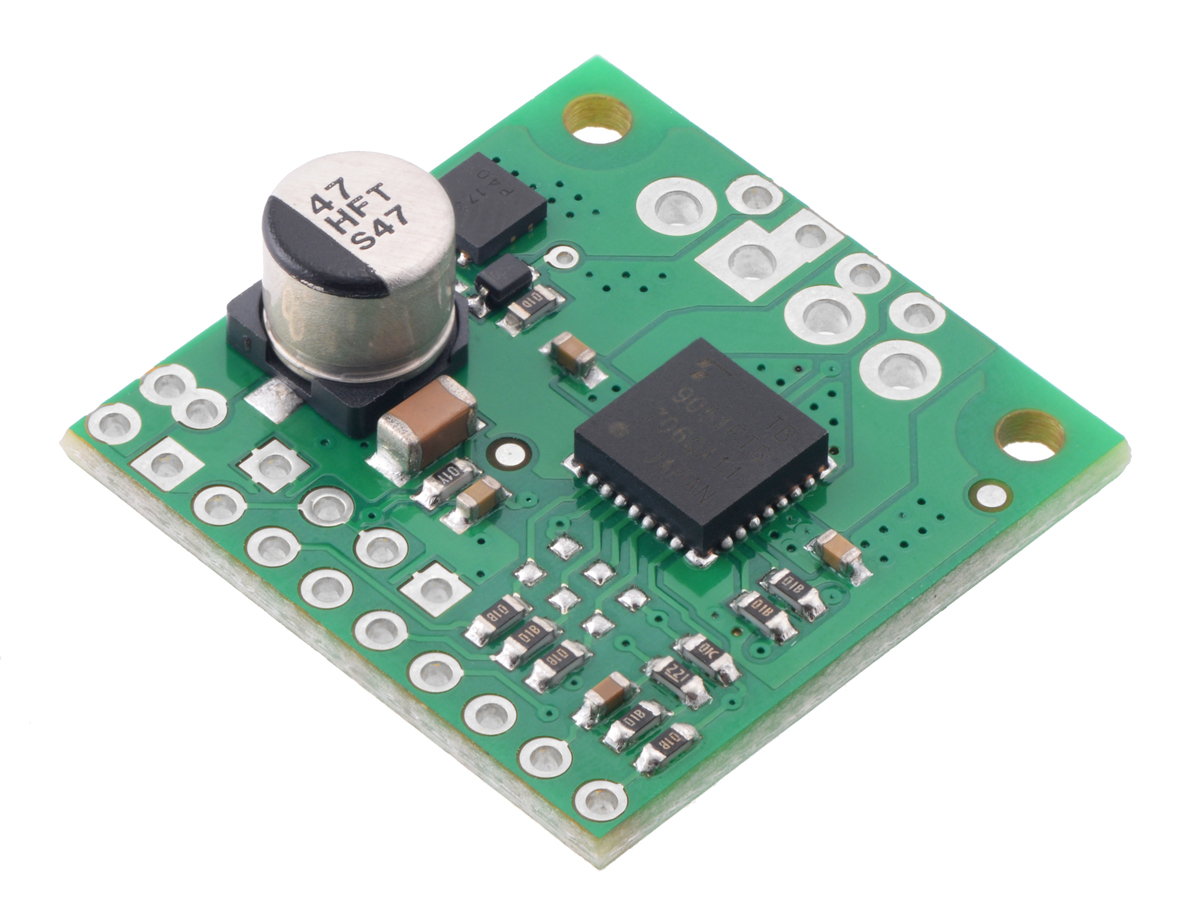
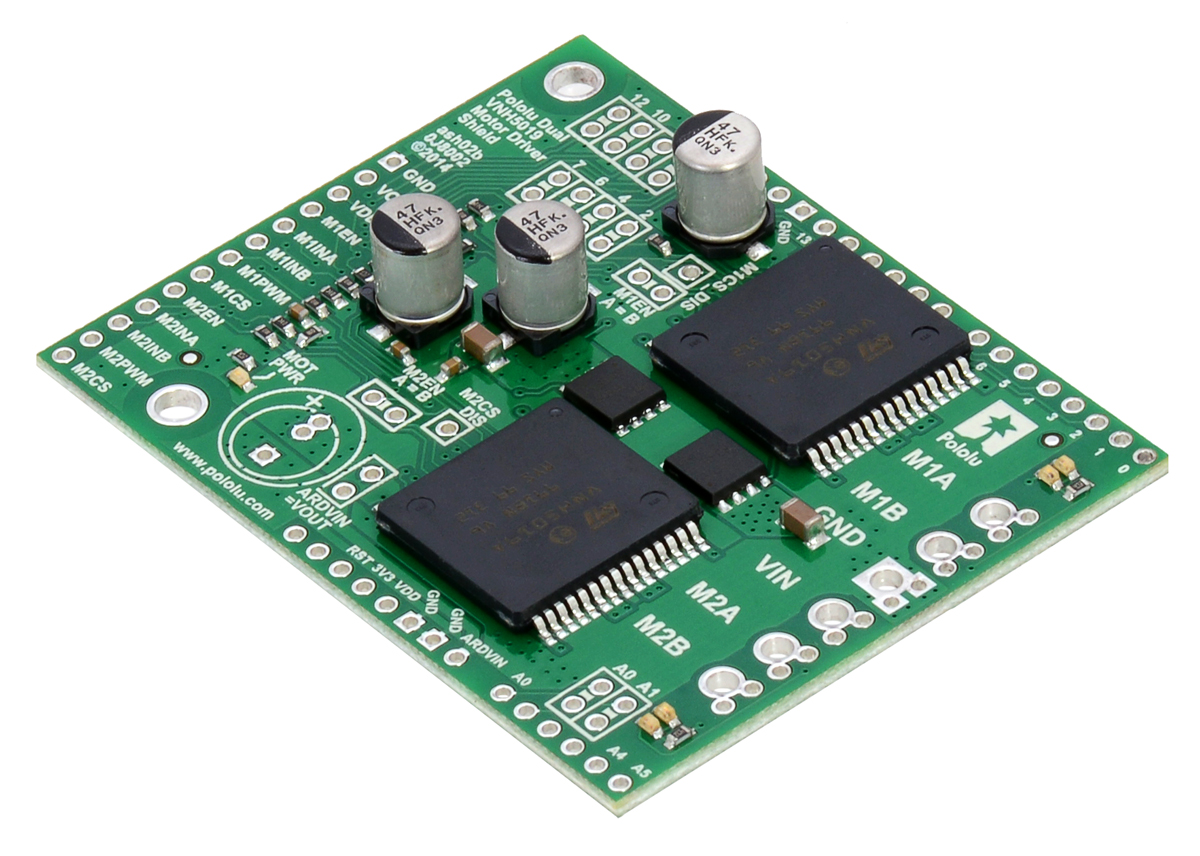
Tenemos una serie de controladores de motor y controladores de motor que funcionan con estos motores de metal de 25D mm. Para las versiones LP y MP, recomendamos nuestros controladores basados en TB9051FTG, para los que tenemos un solo portador básico, un escudo de doble canal para Arduino y una placa de expansión de doble canal para Raspberry Pi. Para las versiones HP, recomendamos nuestros controladores de motor basados en VNH5019 (disponibles como portadores individuales y dobles), aunque también pueden ser una buena opción para los motores de menor potencia.
|
|
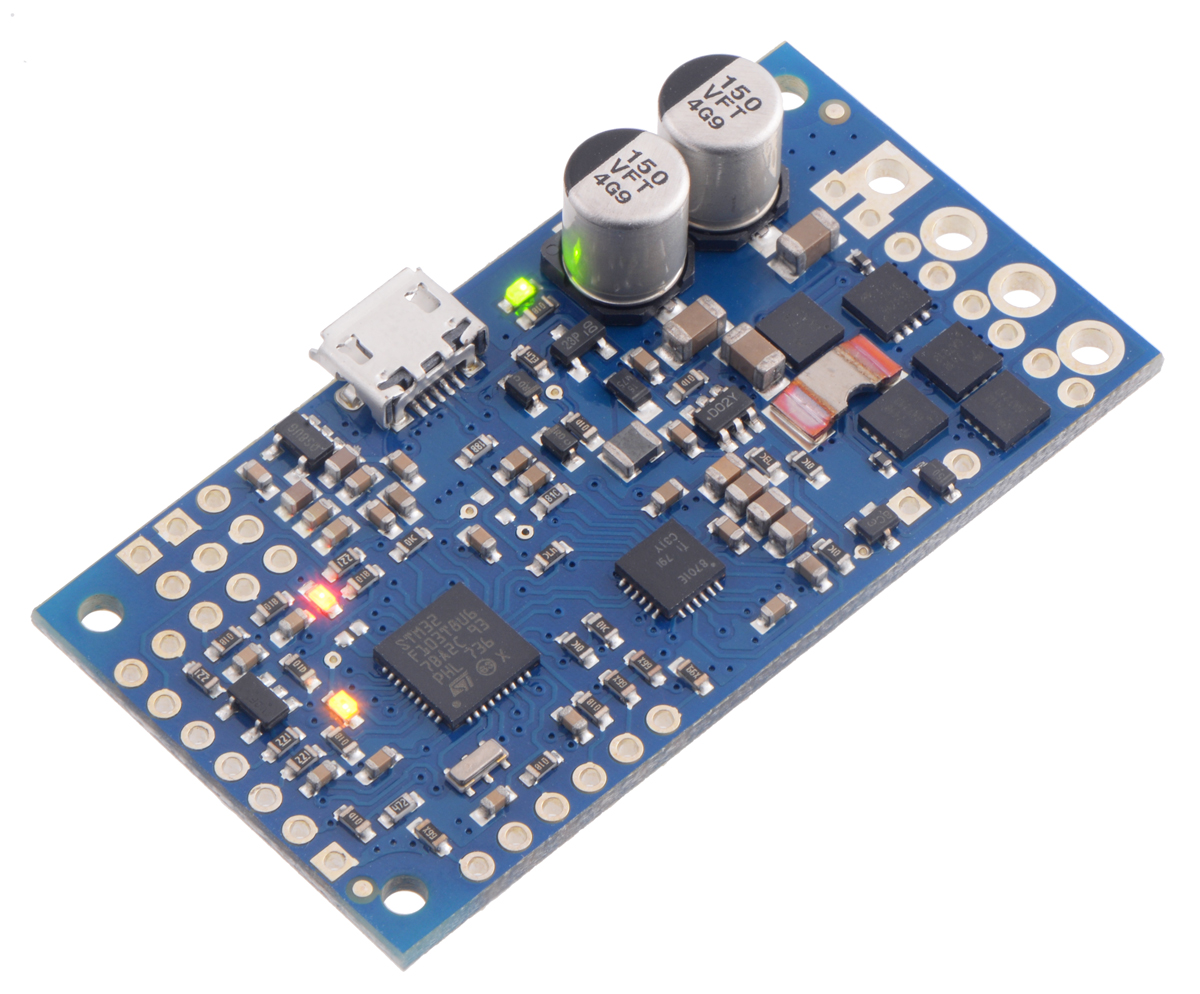
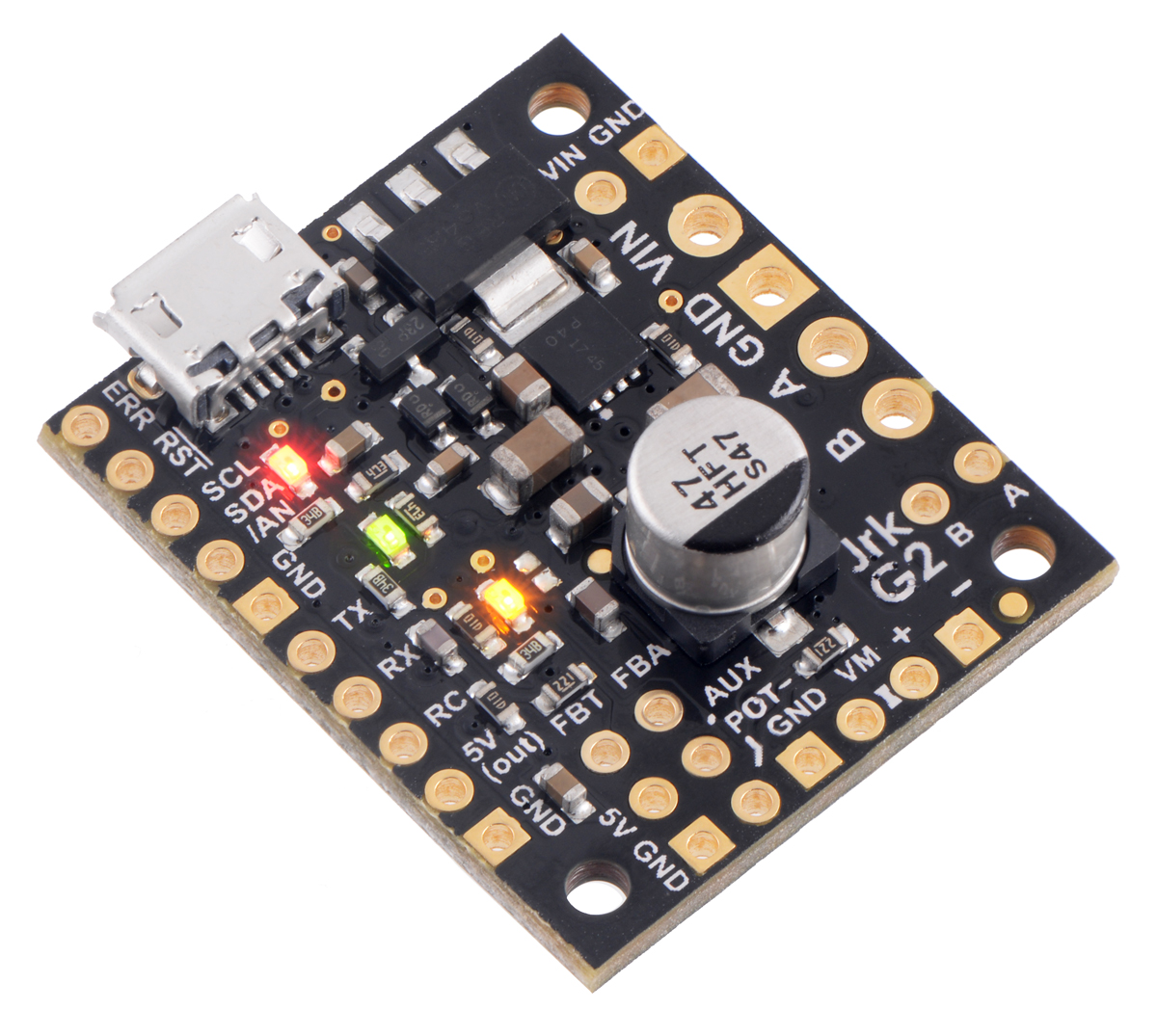
Si está buscando interfaces de control de nivel superior, como USB, RC, voltajes analógicos, I2C o serie TTL, considere nuestros controladores de motor simples, controladores de motor Jrk o controladores de motor RoboClaw; estos controladores están disponibles en varios niveles de potencia, y el adecuado depende de la versión particular del motor de 25D mm que tenga (generalmente recomendamos un controlador de motor que pueda manejar corrientes continuas por encima de la corriente de bloqueo de su motor).
|
|
|

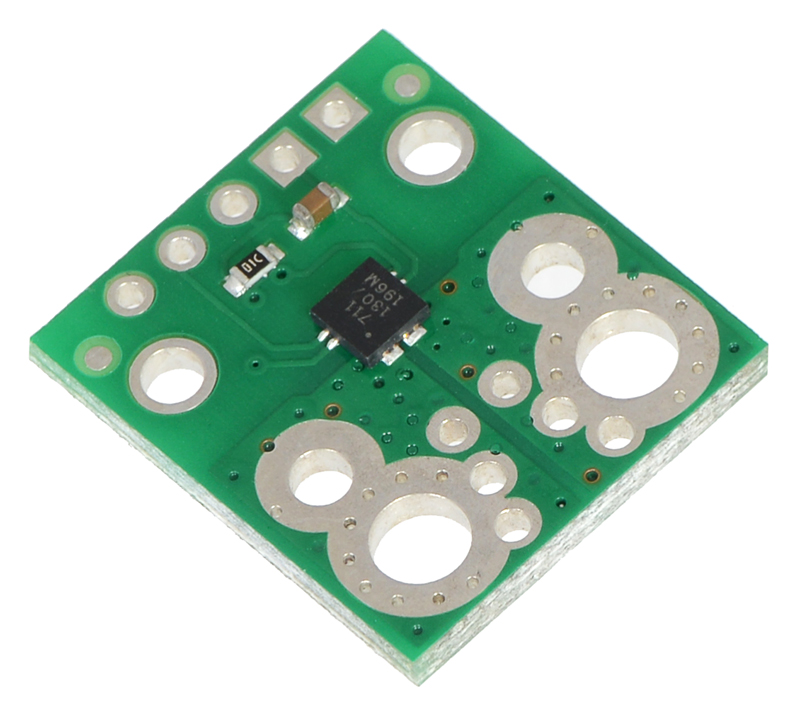
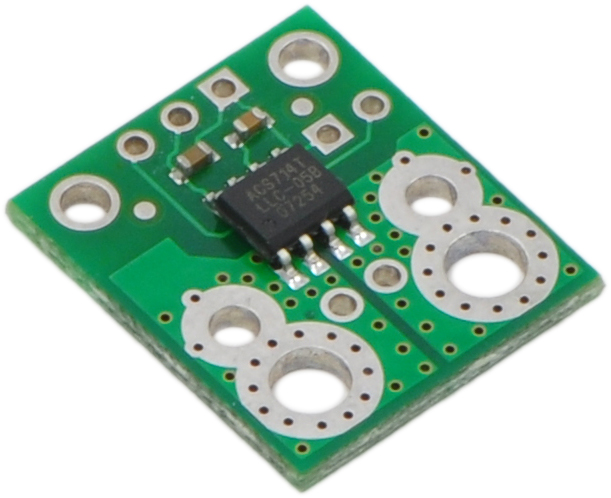
Tenemos una variedad de sensores de corriente basados en efectos Hall para elegir para aquellos que necesitan monitorear la corriente del motor:
|
|


Valoraciones
No hay valoraciones aún.