Descripción
Visión general
Con un diámetro de 37 mm (1,46″), estos motorreductores de CC con escobillas son los más grandes y potentes que tenemos. Están disponibles en una gama de relaciones de transmisión de 6,3:1 a 150:1 y con motores de 12 V o 24 V, y todas las versiones están disponibles con codificadores de cuadratura 64 CPR integrados en los ejes del motor. Los motores de 12 V y 24 V ofrecen aproximadamente el mismo rendimiento en sus respectivos voltajes nominales, con el motor de 24 V consumiendo la mitad de corriente que el motor de 12 V. Consulte la hoja de datos del motorreductor de metal 37D (pdf de 2 MB) para obtener más información, incluidos los gráficos de rendimiento detallados para cada versión del motorreductor. También puede utilizar nuestra tabla de comparación de motorreductores 37D clasificables dinámicamentepara buscar la versión que ofrezca la mejor combinación de velocidad, par y consumo de corriente para su aplicación particular. Una tabla de comparación más básica está disponible a continuación.
Nota: Los pares de torsión y las corrientes de bloqueo enumerados son extrapolaciones teóricas; las unidades normalmente se paran mucho antes de estos puntos a medida que los motores se calientan. El bloqueo o la sobrecarga de los motorreductores puede reducir considerablemente su vida útil e incluso provocar daños inmediatos. El límite superior recomendado para cargas aplicadas continuamente es de 10 kg-cm (150 oz-in), y el límite superior recomendado para torque instantáneo es de 25 kg-cm (350 oz-in). Las paradas también pueden provocar daños térmicos rápidos (potencialmente del orden de segundos) en los devanados y escobillas del motor; una recomendación general para el funcionamiento del motor de CC con escobillas es del 25 % o menos de la corriente de parada.
En general, este tipo de motores pueden funcionar con tensiones superiores e inferiores a las nominales; los voltajes más bajos podrían no ser prácticos y los voltajes más altos podrían comenzar a afectar negativamente la vida útil del motor.
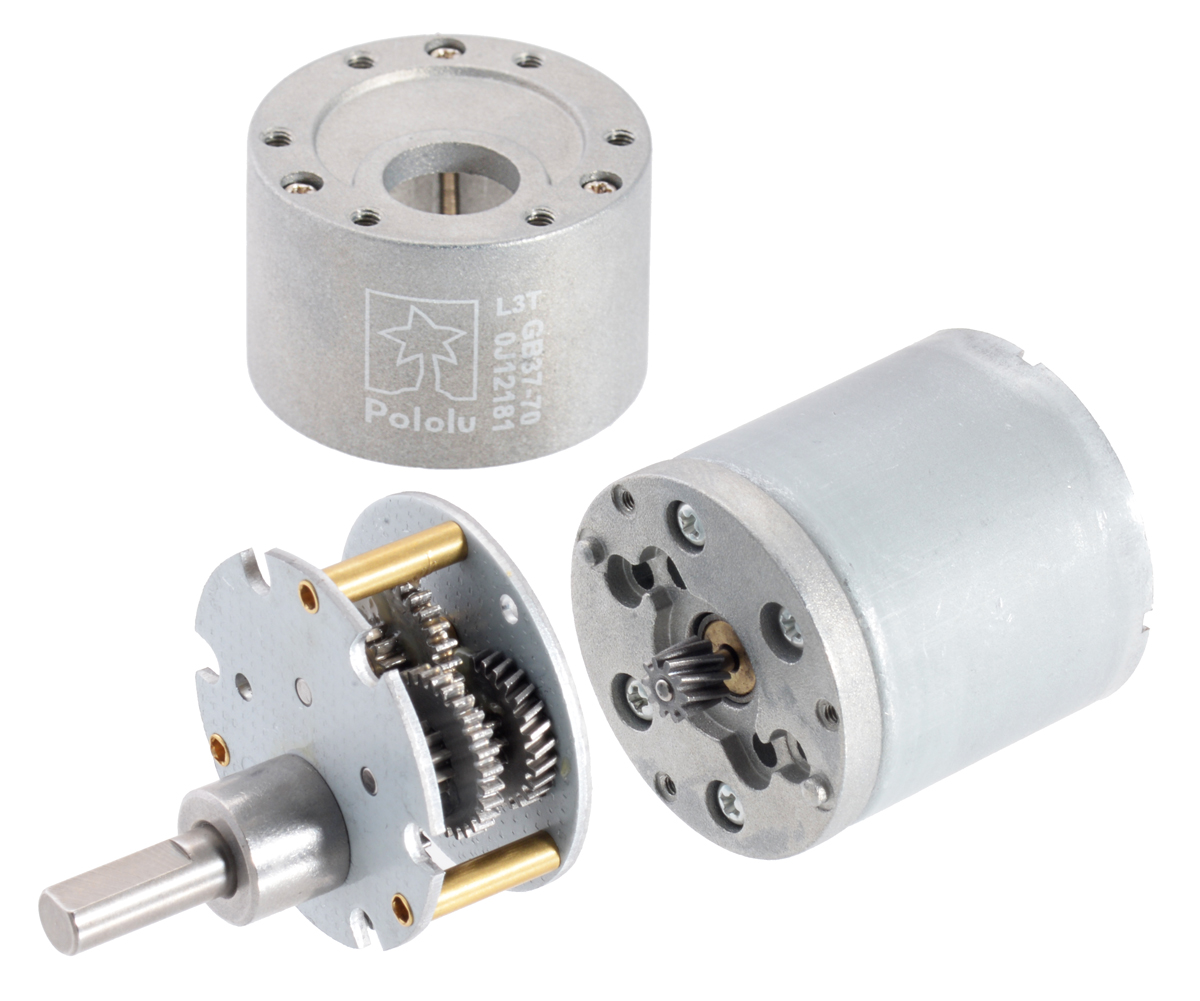
Las cajas de cambios se componen principalmente de engranajes rectos, pero cuentan con engranajes helicoidales para la primera etapa para reducir el ruido y mejorar la eficiencia:
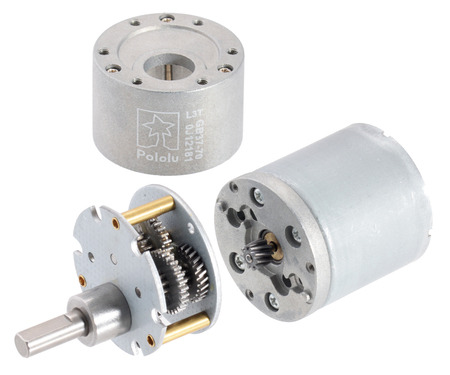 |
| Motorreductor 37D (piñón helicoidal) con la caja de engranajes extraída que muestra el engranaje de piñón helicoidal y el primer engranaje de acoplamiento. |
Detalles para el artículo #4741
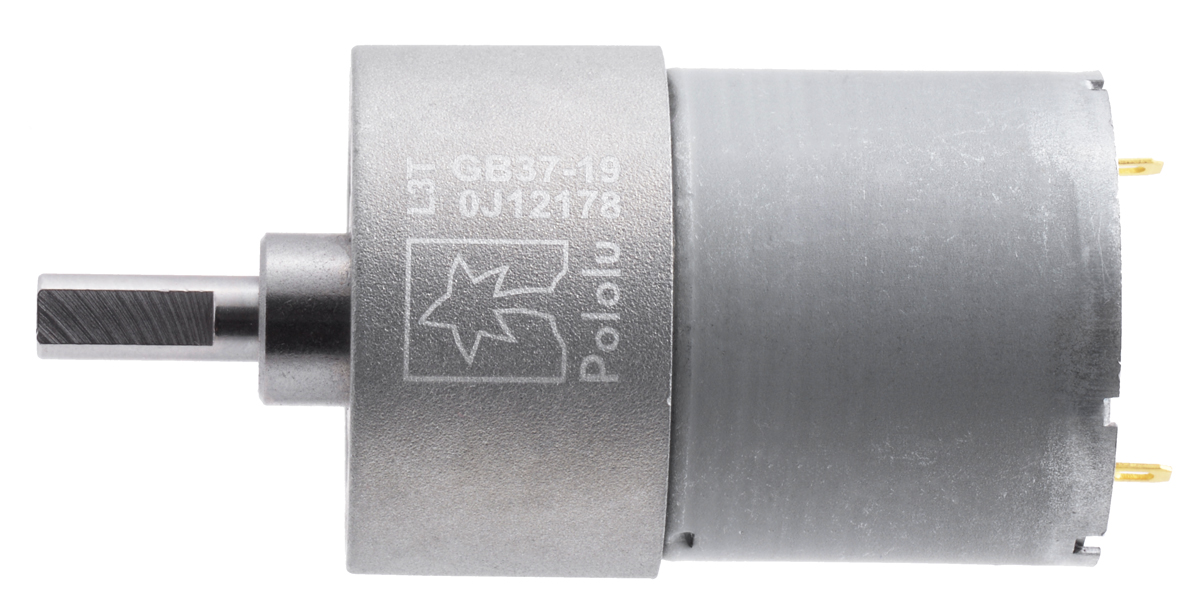
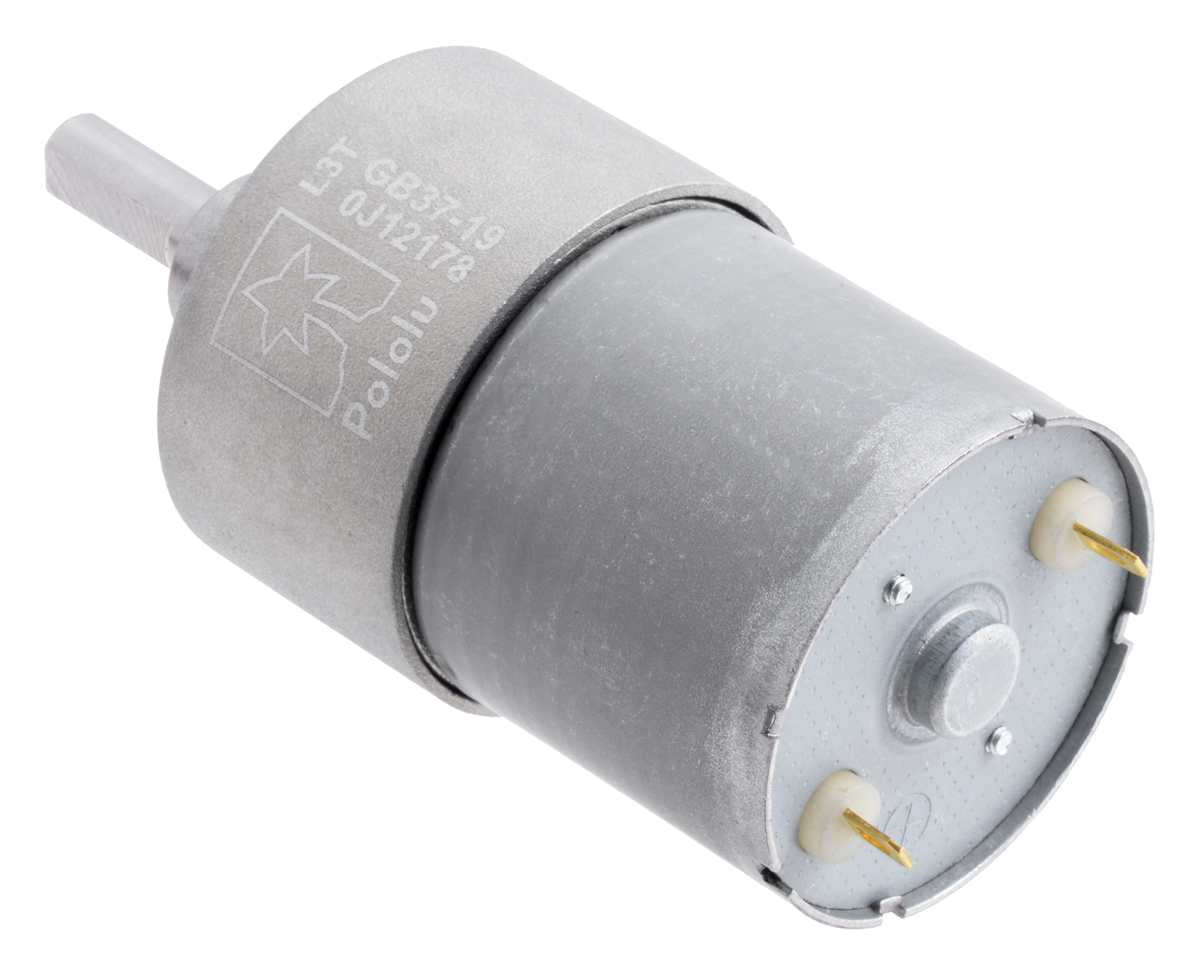
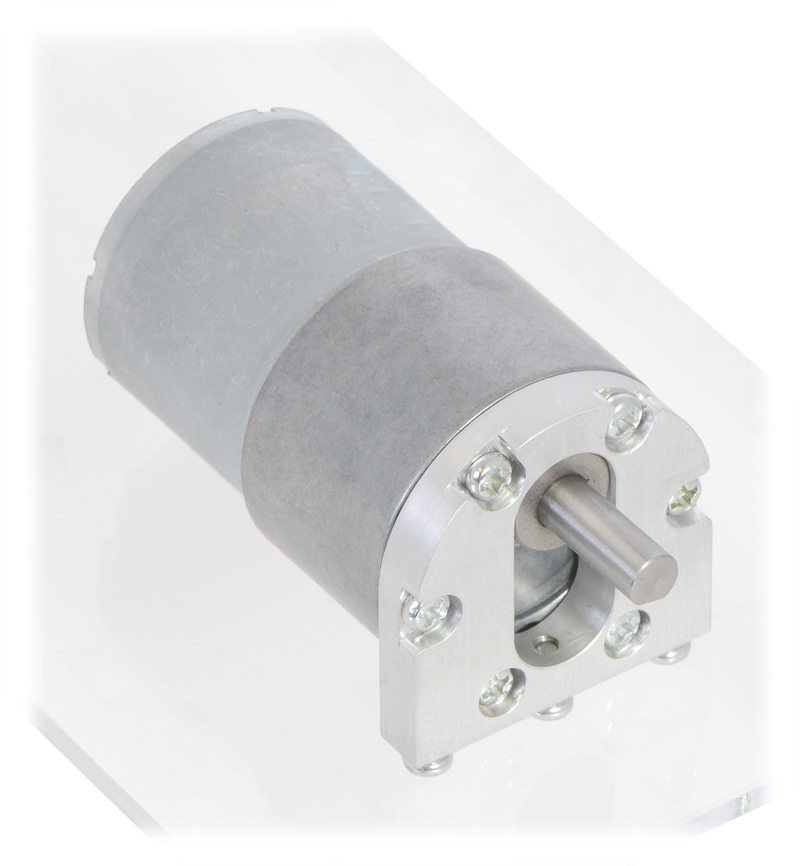
Este motorreductor es un potente motor DC con escobillas y caja de cambios metálica de 18,75:1 diseñado para funcionar a 12 V. Estas unidades tienen un eje de salida en forma de D de 16 mm de largo y 6 mm de diámetro. Este motorreductor también está disponible con encoder integrado .
Especificaciones clave:
| Voltaje |
rendimiento sin carga |
extrapolación de parada |
| 12 voltios |
530 RPM, 200mA |
8,5 kg⋅cm (120 oz⋅in), 5,5 A |
Relación de transmisión exacta:25 × 30 × 3010 × 10 × 12= 1 8 . 7 5 : 125×30×3010×10×12=18.75:1
Dimensiones
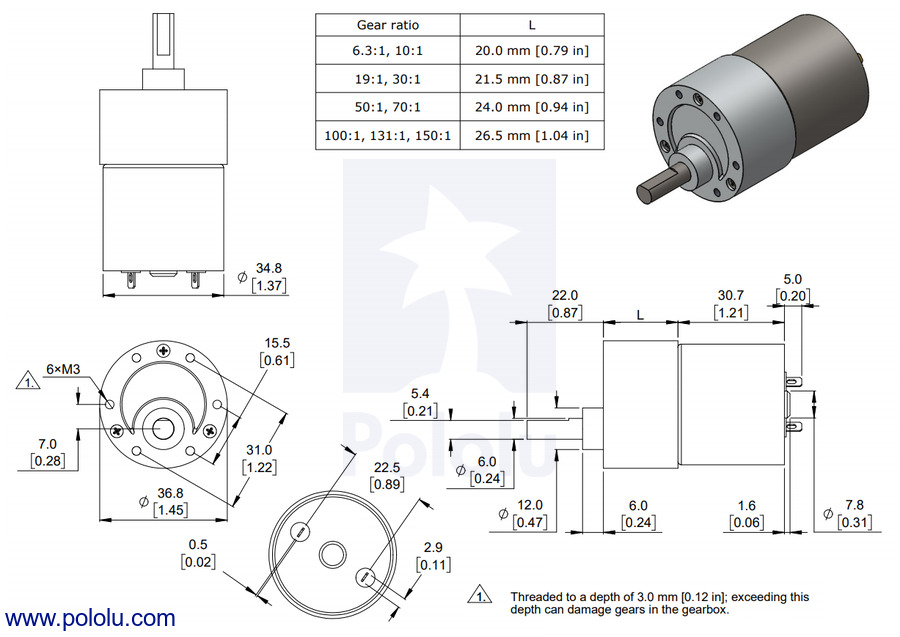 |
| Dimensiones de los motorreductores metálicos 37D (sin encoders). Las unidades son mm sobre [pulgadas]. |
Este diagrama también está disponible como PDF descargable (459k pdf).
Advertencia : no atornille demasiado en los orificios de montaje, ya que los tornillos pueden golpear los engranajes. Recomendamos atornillar no más de 3 mm (0,12″) en el orificio del tornillo.
Accesorios para motorreductores
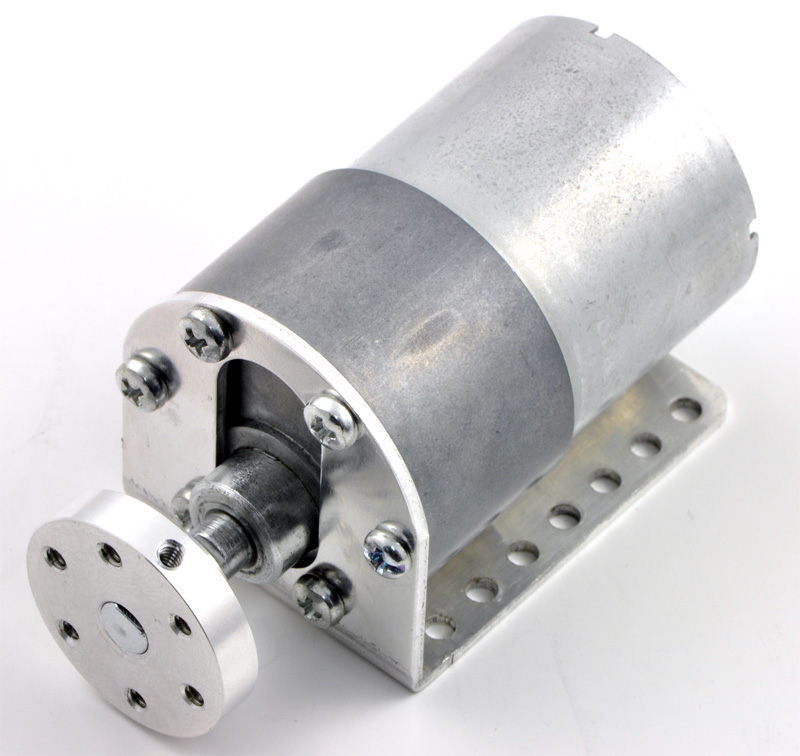
La placa frontal tiene seis orificios de montaje espaciados uniformemente alrededor del borde exterior roscados para tornillos M3. Estos orificios de montaje forman un hexágono regular y los centros de los orificios vecinos están separados por 15,5 mm. Tenemos dos soportes para estos motorreductores: un soporte en L de aluminio estampado (se vende en pares) y un soporte de aluminio maquinado estilo tombstone más resistente (se vende individualmente):
 |
| Motorreductor de 37D mm (sin codificador) con soporte en L y cubo de montaje universal de 6 mm. |
|
 |
| Soporte de aluminio mecanizado Pololu para motorreductores metálicos de 37D mm que montan un motor en una pieza de acrílico transparente. |
|
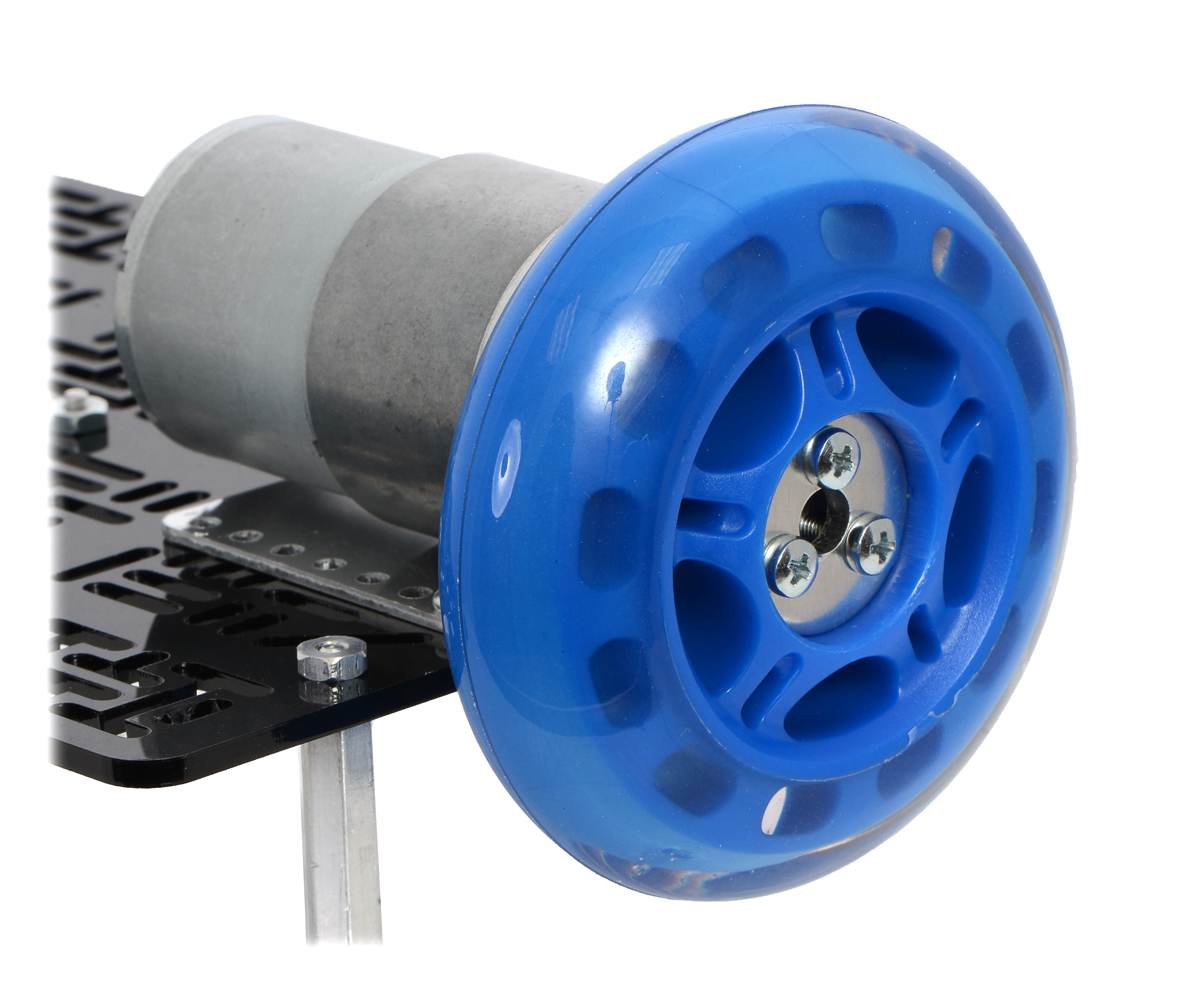
El eje de salida de la caja de engranajes de 6 mm de diámetro funciona con el cubo de montaje de aluminio universal Pololu para ejes de 6 mm , que se puede usar para montar nuestras ruedas Pololu más grandes (80 mm y 90 mm de diámetro) o ruedas y mecanismos personalizados en el eje de salida del motorreductor como se muestra en la imagen de la izquierda a continuación. Alternativamente, puede usar nuestro adaptador de rueda de scooter de 6 mm para montar muchas ruedas comunes de scooter, monopatín y patines en línea en el eje de salida del motorreductor como se muestra en la imagen de la derecha a continuación:
 |
| Rueda Pololu negra de 90 × 10 mm en un motorreductor de metal Pololu 37D mm. |
|
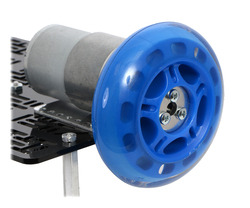 |
| Un motorreductor de 37D mm conectado a una rueda de scooter mediante el adaptador de rueda de scooter de 6 mm. |
|
Para un adaptador hexagonal de uso general, considere nuestro adaptador de rueda hexagonal de 12 mm (también disponible en una versión extendida ), que le permite usar estos motores con muchas ruedas RC de pasatiempo comunes, incluidas las ruedas Dagu Wild Thumper :
 |
| Adaptador de rueda hexagonal de 12 mm para eje de 6 mm que conecta una rueda Wild Thumper a un motorreductor de metal de 37D mm. |
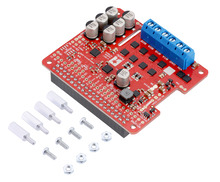
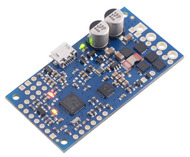
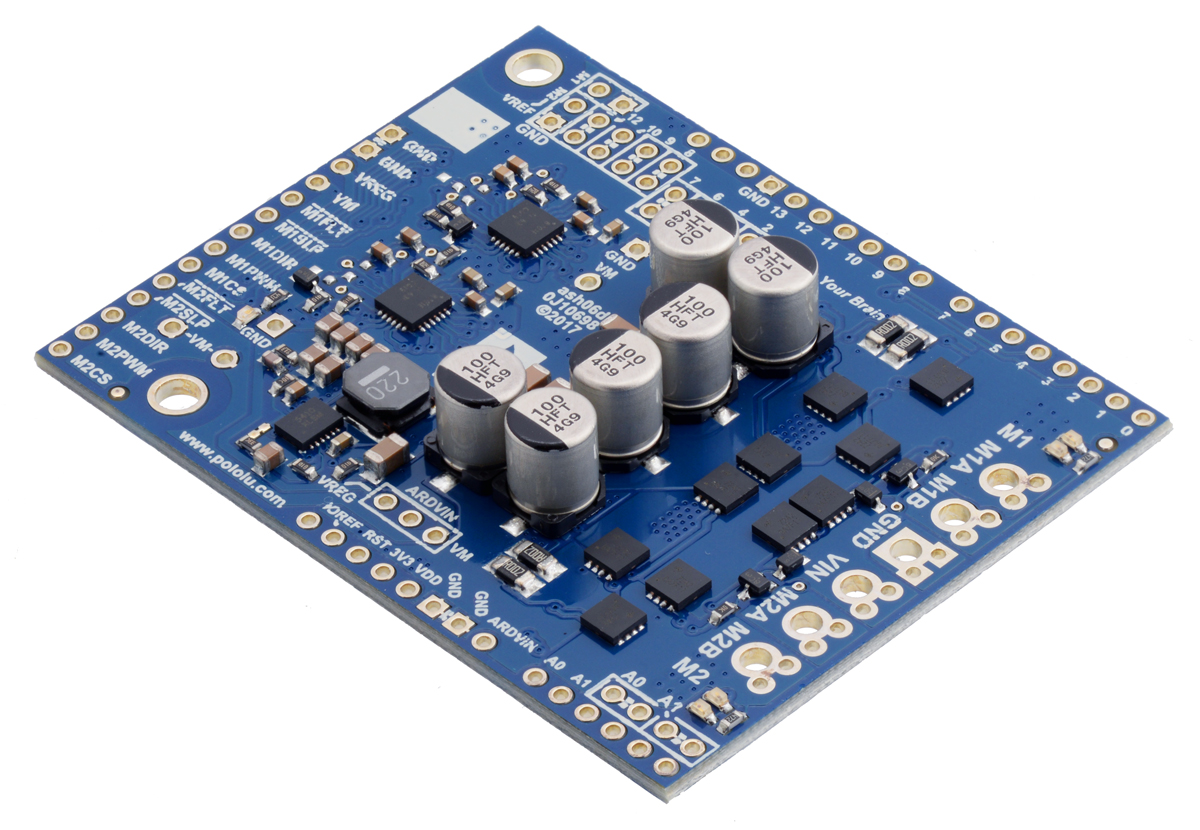
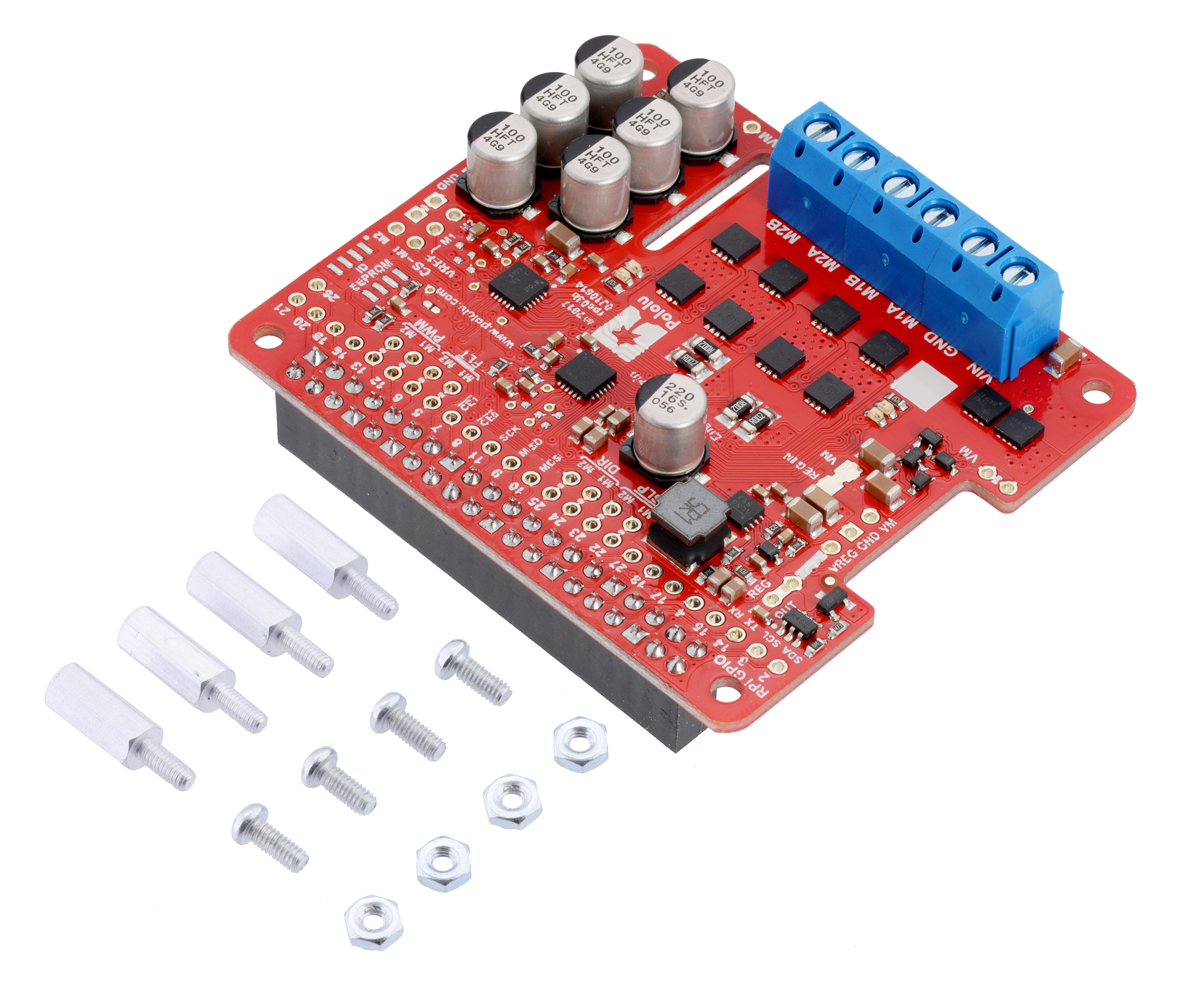
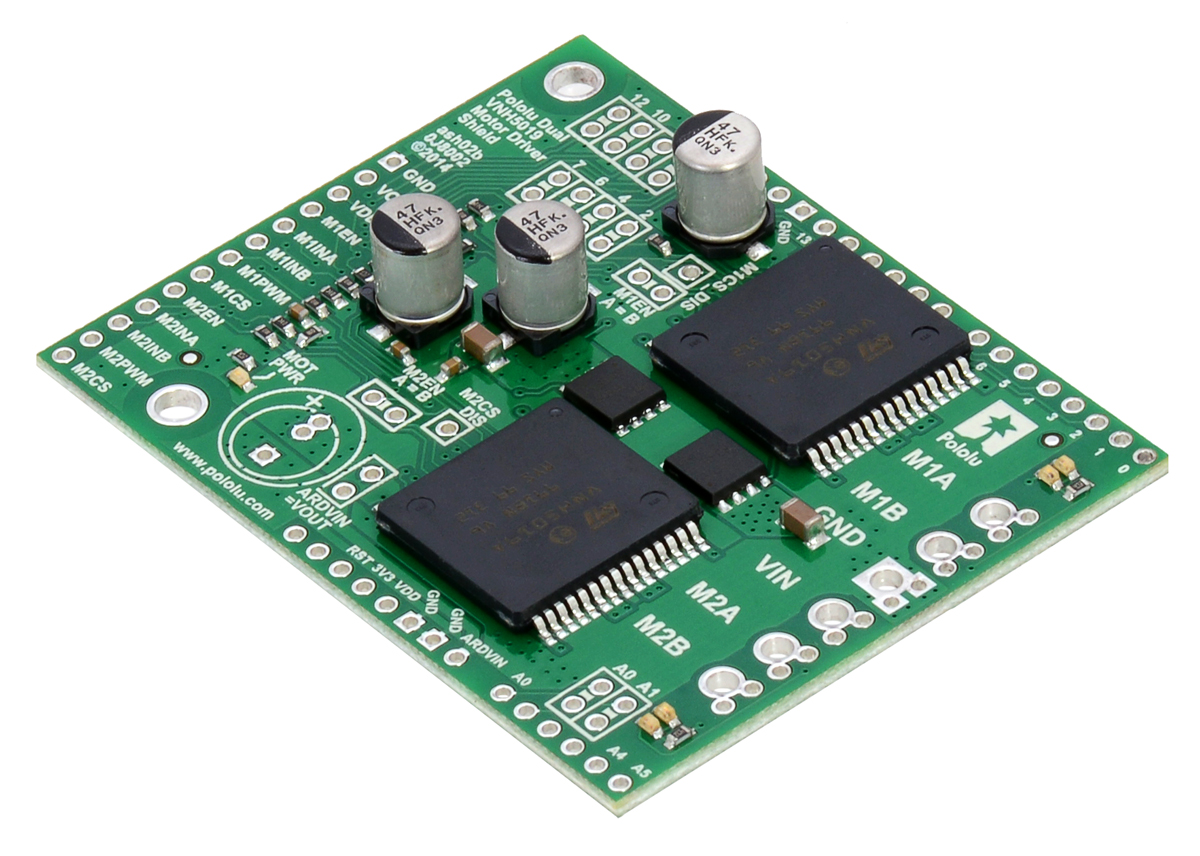
Tenemos varios impulsores de motor y controladores de motor que funcionan con estos motorreductores metálicos de 37D mm. En general, recomendamos nuestros controladores de motor de alta potencia , que están disponibles en varios niveles de potencia y versiones, incluidos algunos protectores de doble canal para Arduino y placas de expansión de doble canal para Raspberry Pi . Además, nuestros controladores de motor basados en VNH5019, que también están disponibles como portadores simples y dobles , son una buena combinación para estos motorreductores.
 |
| Controlador de motor de alta potencia Pololu Dual G2 24v14 Shield para Arduino. |
|
 |
| Controlador de motor de alta potencia Pololu Dual G2 24v14 para Raspberry Pi (versión ensamblada) con hardware incluido. |
|
 |
| Escudo de controlador de motor Pololu dual VNH5019 para Arduino. |
|
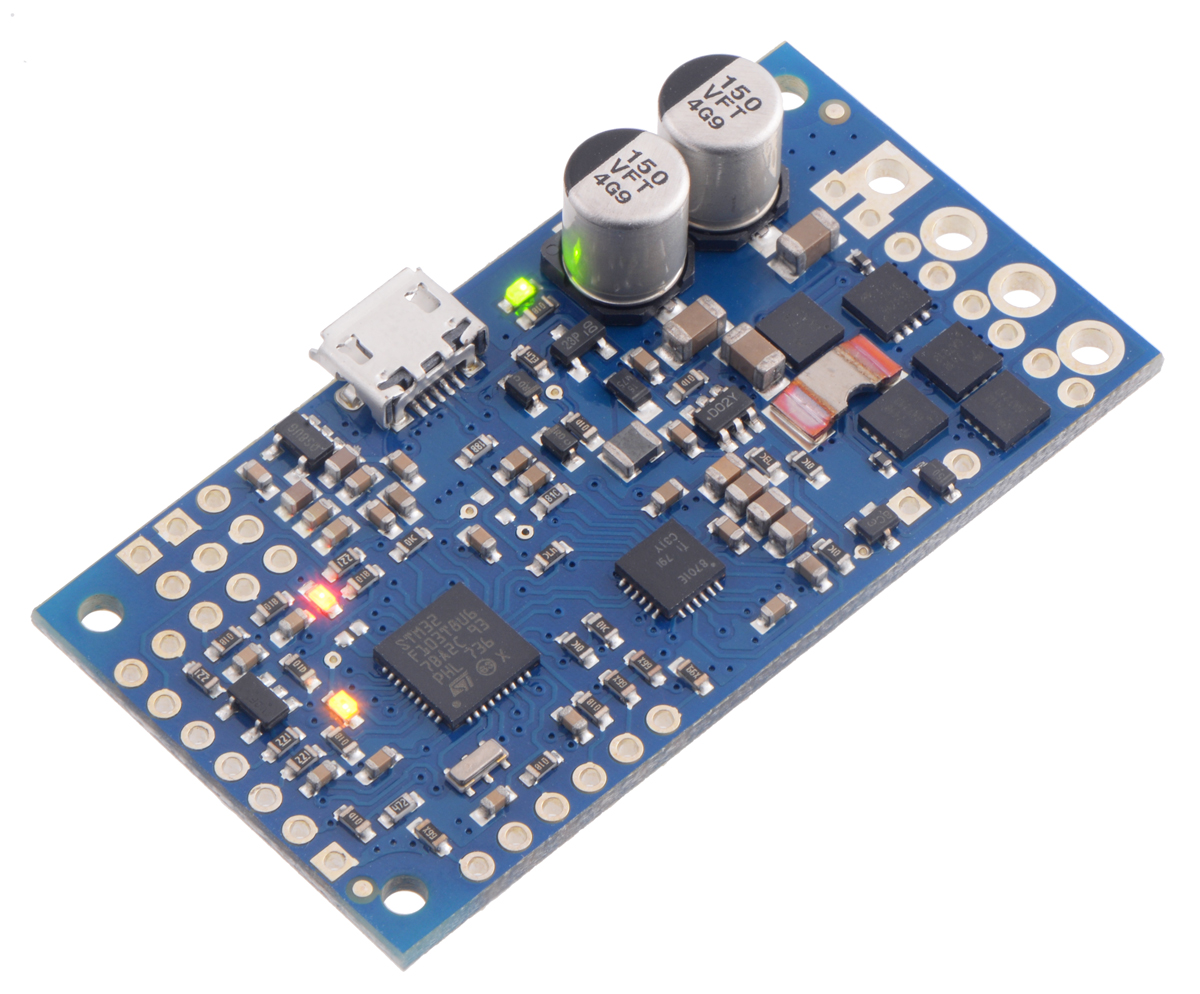
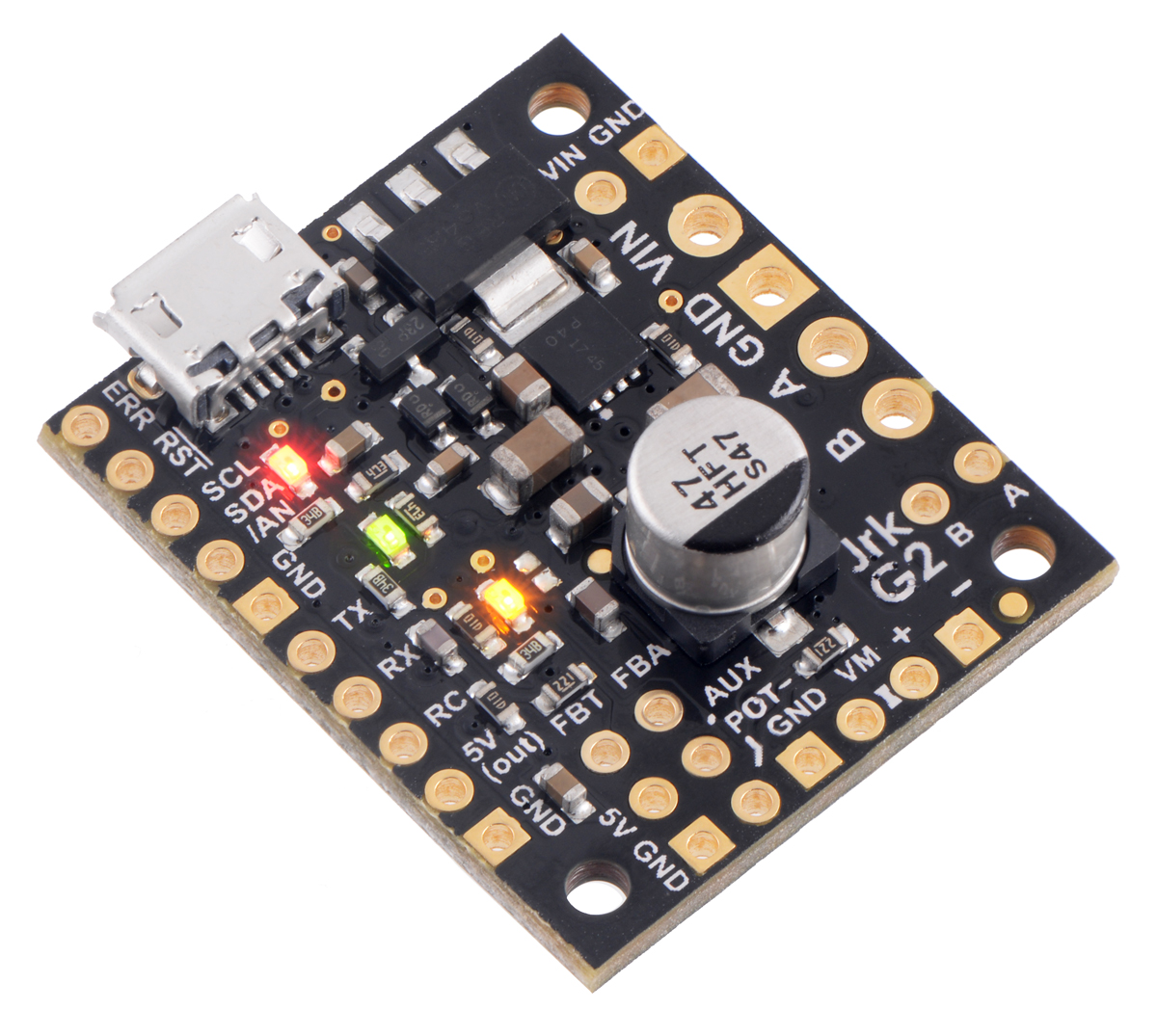
Si está buscando interfaces de control de nivel superior, como USB, RC, voltajes analógicos, I²C o serie TTL, considere nuestros controladores de motor simples , controladores de motor Jrk o controladores de motor RoboClaw ; estos controladores están disponibles en varios niveles de potencia, varios de los cuales pueden manejar estos motorreductores metálicos de 37D mm (generalmente recomendamos un controlador de motor que pueda manejar corrientes continuas por encima de la corriente de bloqueo de su motor).
 |
| Controlador de motor simple de alta potencia G2 18v15. |
|
 |
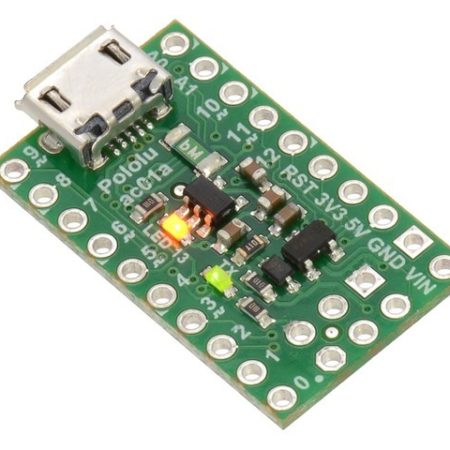
| Controlador de motor USB Jrk G2 21v3 con retroalimentación. |
|
 |
| Controlador de motor RoboClaw 2×7A (V5B) en su estuche incluido. |
|
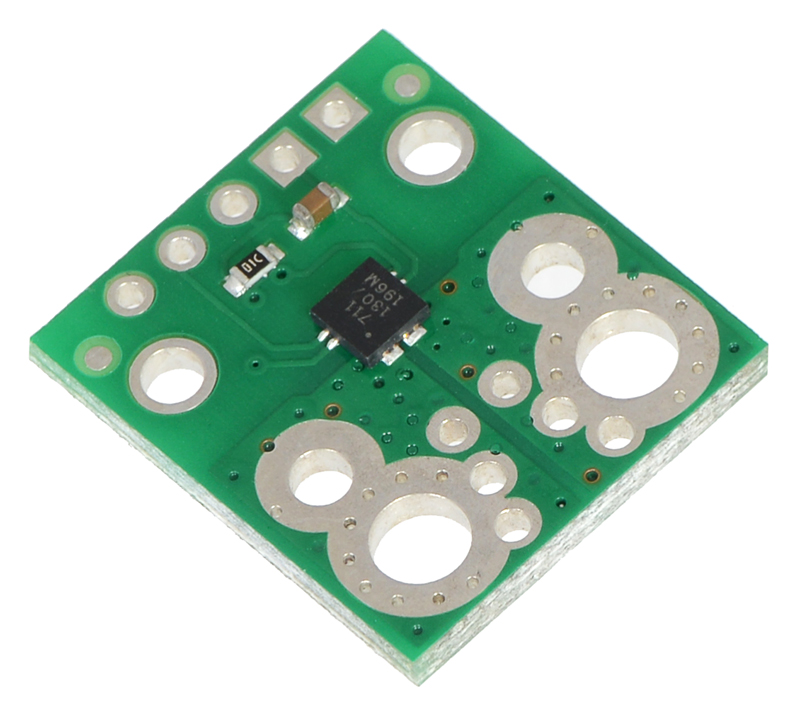
Tenemos una variedad de sensores de corriente basados en el efecto Hall para elegir para aquellos que necesitan monitorear la corriente del motor:
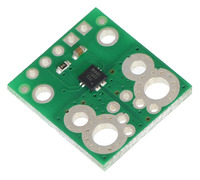 |
| Portasensor de corriente ACS711EX -15,5 A a +15,5 A. |
|
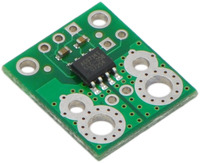 |
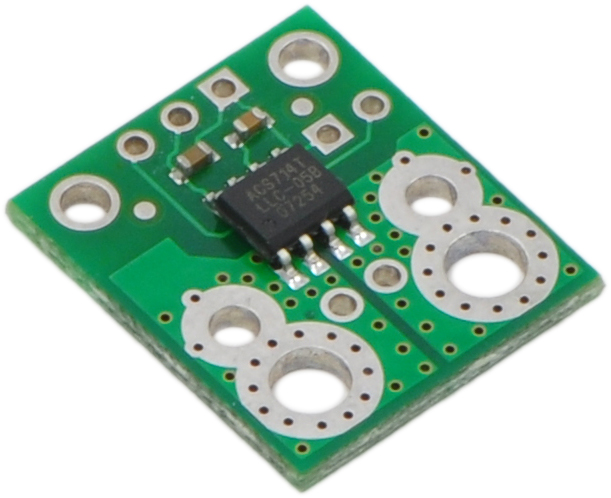
| Portasensor de corriente ACS714 -5A a +5A. |
|
Selección del motorreductor adecuado
Ofrecemos una amplia selección de motorreductores metálicos que ofrecen diferentes combinaciones de velocidad y par. Nuestra tabla de comparación de motorreductores de metal puede ayudarlo a encontrar el motor que mejor se adapte a los requisitos de su proyecto.





















Valoraciones
No hay valoraciones aún.