







CONTROLADOR DUAL DE MOTORES POLOLU DRV8833 #2130
$15,99
Esta pequeña placa de conexión para el controlador de motor dual DRV8833 de TI puede suministrar 1.2 A por canal de forma continua (2 A pico) a un par de motores de CC. Con un rango de voltaje operativo de 2.7 V a 10.8 V y protección incorporada contra voltaje inverso, bajo voltaje, sobrecorriente y sobretemperatura, este controlador es una gran solución para alimentar motores pequeños de bajo voltaje.
5 disponibles
Descripción
Visión general
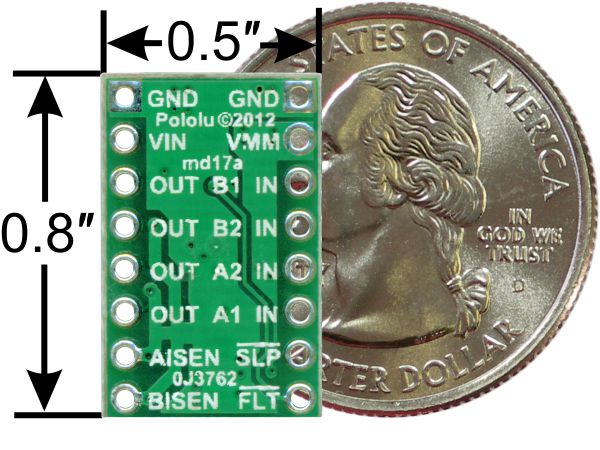 |
| DRV8833 portador de controlador de doble motor, vista inferior con dimensiones. |
|---|
El DRV8833 de Texas Instruments es un IC de controlador de motor de doble puente H que se puede utilizar para el control bidireccional de dos motores de CC cepillados a 2,7 V a 10,8 V. Puede suministrar hasta aproximadamente 1,2 A por canal de forma continua y puede tolerar corrientes máximas de hasta 2 A por canal durante unos segundos, lo que lo convierte en un controlador ideal para motores pequeños que funcionan con voltajes relativamente bajos. Dado que esta placa es un soporte para el DRV8833, recomendamos leer detenidamente la hoja de datos del DRV8833 (1MB pdf). La placa se envía con componentes SMD, incluido el DRV8833, y agrega un FET para la protección inversa de la batería.
Esta placa es muy similar a nuestro soporte de controlador de motor dual DRV8835 en el rango de voltaje de operación y la clasificación de corriente continua, pero el DRV8835 tiene un voltaje de operación mínimo más bajo, ofrece un modo de interfaz de control adicional y es 0.1 “más pequeño en cada dimensión; También llevamos un escudo de controlador de motor dual DRV8835 que es fácil de usar con un Arduino. El DRV8833 tiene una clasificación de corriente pico más alta (2 A por canal frente a 1.5 A), limitación de corriente incorporada opcional y no necesita voltaje lógico suministrado externamente.
Para una alternativa de un solo canal más pequeña y de menor costo para este controlador, considere nuestro soporte DRV8838 , que ofrece un rango de voltaje de operación y capacidades de corriente similares.
Para alternativas de mayor voltaje a este controlador, considere nuestros transportadores de motor A4990 y DRV8801 .
Caracteristicas
- Controlador de motor de doble puente H: puede conducir dos motores de CC o un motor paso a paso bipolar
- Voltaje de funcionamiento: 2.7 V a 10.8 V
- Corriente de salida: 1.2 A continua (2 A pico) por motor
- Las salidas del motor pueden conectarse en paralelo para suministrar 2,4 A continuos (4 A pico) a un solo motor
- Las entradas son compatibles con 3V y 5V
- Bloqueo de bajo voltaje y protección contra sobrecorriente y sobretemperatura
- Circuito de protección de voltaje inverso
- La limitación de corriente se puede habilitar agregando resistencias de detección (no incluidas)
Usando el controlador del motor
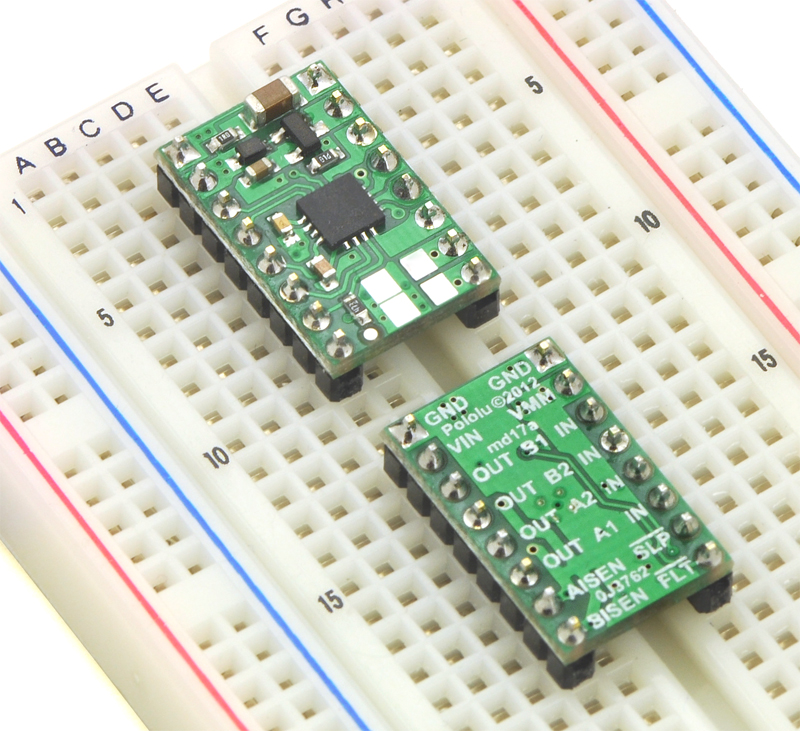
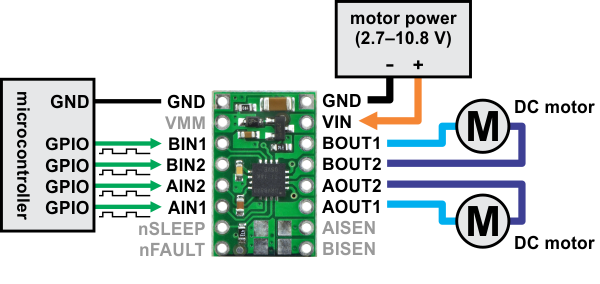 |
| Diagrama de cableado mínimo para conectar un microcontrolador a un soporte de controlador de motor dual DRV8833. |
|---|
En una aplicación típica, las conexiones de alimentación se realizan en un lado de la placa y las conexiones de control se realizan en el otro. El pin nSLEEP se coloca en lo alto de la placa y se puede dejar desconectado si no desea utilizar el modo de reposo de baja potencia del DRV8833. Cada uno de los dos canales del motor tiene un par de entradas de control, xIN1 y xIN2, que establecen el estado de las salidas correspondientes, xOUT1 y xOUT2; La señal modulada por ancho de pulso (PWM) se puede aplicar a cada una de estas entradas. Las entradas de control se bajan internamente, desactivando efectivamente las salidas del controlador del motor por defecto. Consulte las tablas de verdad en la hoja de datos DRV8833 para obtener más información sobre cómo las entradas afectan las salidas del controlador.
El pin nFAULT es una salida de drenaje abierto que es impulsada por el chip cuando ocurre una condición de sobrecorriente, sobretemperatura o bajo voltaje. De lo contrario, permanece en un estado flotante, por lo que deberá conectar una resistencia pull-up externa (o usar una entrada de microcontrolador con su pull-up incorporado habilitado) si desea monitorear las condiciones de falla en el controlador.
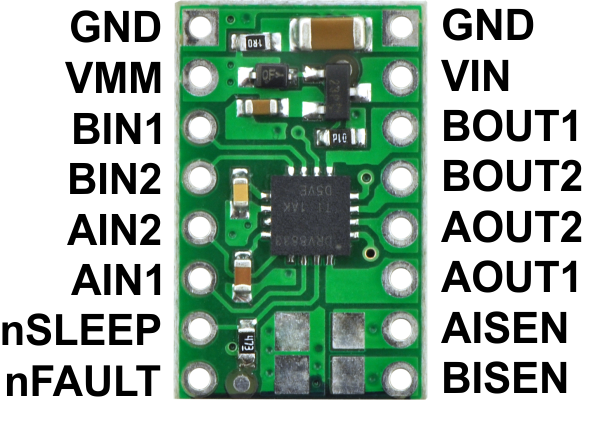
Pinout
 |
| ALFILER | Estado predeterminado | Descripción |
|---|---|---|
| VIN | Conexión de fuente de alimentación del motor de 2.7 V a 10.8 V con protección inversa. La operación con VIN por debajo de 5 V reduce ligeramente la salida de corriente máxima. | |
| VMM | Este pin da acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el esquema de la placa a continuación). Se puede usar para suministrar energía con protección inversa a otros componentes del sistema. Generalmente se piensa como una salida, pero también se puede usar para suministrar energía a la placa. | |
| GND | Puntos de conexión a tierra para la fuente de alimentación del motor y referencia de tierra de control. La fuente de control y el controlador del motor deben compartir un terreno común. | |
| AOUT1 | El motor A medio puente 1 salida. | |
| AOUT2 | El motor A medio puente 2 de salida. | |
| BOUT1 | La salida del medio puente 1 del motor B. | |
| BOUT2 | El motor B medio puente 2 de salida. | |
| AIN1 | BAJO | Se puede aplicar un control de entrada lógica para el canal de motor A. PWM a este pin. |
| AIN2 | BAJO | Se puede aplicar un control de entrada lógica para el canal de motor A. PWM a este pin. |
| BIN1 | BAJO | Se puede aplicar un control de entrada lógica para el canal del motor B. PWM a este pin. |
| BIN2 | BAJO | Se puede aplicar un control de entrada lógica para el canal del motor B. PWM a este pin. |
| nSLEEP | ALTO | Entrada de reposo: cuando este pin se baja, el chip entra en un modo de reposo de baja potencia. (Etiquetado SLP en la pantalla serigrafiada). |
| nFAULT | FLOTADOR | Salida de falla: conducido bajo en el caso de una condición de sobrecorriente, sobretemperatura o bajo voltaje; flotando de otra manera. (Etiquetado FLT en la pantalla serigrafiada). |
| AISEN | Pin de detección de corriente para el motor A. Este pin está conectado a tierra y no funciona de manera predeterminada, pero la limitación de corriente puede habilitarse realizando las modificaciones que se describen a continuación. | |
| BISEN | Pin de detección de corriente para el motor B. Este pin está conectado a tierra y no funciona de manera predeterminada, pero la limitación de corriente se puede habilitar realizando las modificaciones que se describen a continuación. |
Limitacion actual
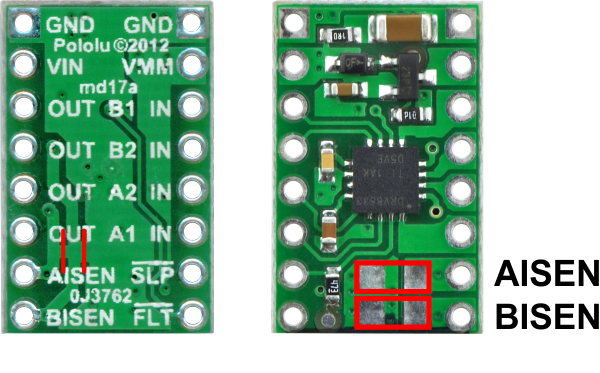
El DRV8833 puede limitar activamente la corriente a través de los motores mediante el uso de una regulación de corriente PWM de frecuencia fija (corte de corriente). De forma predeterminada, esta placa de soporte conecta los pines de detección actuales a tierra, deshabilitando la función de limitación actual. Para habilitar la limitación de corriente, puede usar un cuchillo para cortar los puntos de ruptura en la parte posterior de la placa y luego soldar algunas resistencias de detección de corriente apropiadas a las almohadillas despobladas en la parte delantera, como se indica en la imagen a continuación. Las almohadillas están dimensionadas para 1206 resistencias de montaje en superficie. Consulte la hoja de datos DRV8833 para obtener información sobre cómo el valor de la resistencia determina la corriente de corte.
 |
Consideraciones de disipación de poder en el mundo real
La hoja de datos DRV8833 recomienda una corriente continua máxima de 1.5 A por canal del motor. Sin embargo, el chip por sí solo se sobrecalentará a corrientes más bajas. Por ejemplo, en nuestras pruebas a temperatura ambiente sin flujo de aire forzado, el chip pudo suministrar 1.5 A por canal durante aproximadamente un minuto antes de que la protección térmica del chip se activara y desactivara las salidas del motor, mientras que una corriente continua de 1.2– 1.3 A por canal fue sostenible durante muchos minutos sin provocar un apagado térmico. La corriente real que puede suministrar dependerá de qué tan bien pueda mantener fresco el controlador del motor. La placa de circuito impreso del soporte está diseñada para extraer calor del chip del controlador del motor, pero el rendimiento puede mejorarse agregando un disipador de calor. Nuestras pruebas se realizaron al 100% del ciclo de trabajo; PWMing el motor introducirá un calentamiento adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para quemarlo mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Hardware incluido
|
|
Dos 1 × 8-pin de ruptura 0.1 “conectores macho se incluyen con el portador de conductor de doble motor DRV8833, que puede ser soldada en utilizar el controlador con perfboards, placas universales , o 0.1” conectores hembra . (Los encabezados pueden enviarse como una sola pieza de 1 × 16 que se puede dividir por la mitad). La imagen de arriba muestra las dos posibles orientaciones del tablero cuando se usa con estos pasadores de encabezado (partes visibles o serigrafía visibles). También puede soldar los cables del motor y otras conexiones directamente a la placa.
Esquemático
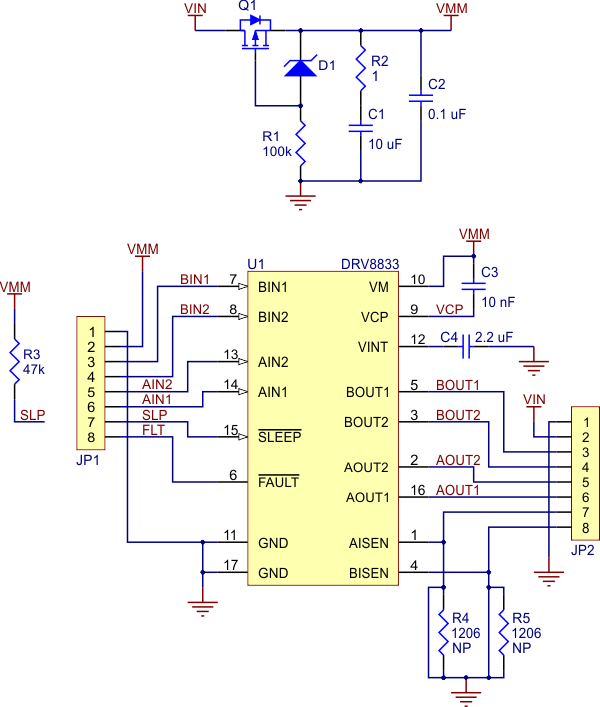 |
| Diagrama esquemático del controlador DRV8833 de doble motor. |
|---|



Valoraciones
No hay valoraciones aún.