









CONTROLADOR DUAL DE MOTORES POLOLU TB67H420FTG PUENTE H POLOLU
$17,99
Esta placa de ruptura facilita el uso del controlador de motor de CC cepillado TB67H420FTG de Toshiba, que puede funcionar en modo de doble canal para el control bidireccional independiente de dos motores o el modo de un solo canal para conducir un motor con mayor corriente. Tiene un amplio rango de voltaje de funcionamiento de 10 V a 47 V y puede entregar un continuo 1.7 A a cada canal de motor, o 3.4 A en modo de un solo canal. Un umbral de corte de corriente configurable permite que el TB67H420 limite activamente la corriente del motor, y cuenta con protección integrada contra condiciones de bajo voltaje, sobrecorriente y sobretemperatura; nuestra placa portadora también añade protección de voltaje inverso (hasta 40 V).
3 disponibles
Descripción
Visión general
El TB67H420FTG de Toshiba es un IC de controlador de motor de puente H que se puede utilizar para el control bidireccional de uno o dos motores de CC cepillados a 10 V a 47 V. Puede suministrar hasta aproximadamente 1,7 A continuamente a cada uno de dos motores separados o aproximadamente 3,4 A a un solo motor, y puede tolerar corrientes máximas de hasta 4,5 A por canal (doble) o 9 A (solo) durante unos segundos, por lo que es una buena opción para motores pequeños y medianos que funcionan a tensiones más altas. El TB67H420FTG es un gran IC, pero su pequeño paquete de montaje en superficie hace que sea difícil de usar para el estudiante o aficionado típico; nuestra placa de ruptura hace que sea fácil de usar con placas de pan sin soldadura estándar y 0.1 “perfboards. Dado que esta placa es una portadora para el TB67H420FTG, recomendamos una lectura cuidadosa de la hoja de datos TB67H420FTG (460k pdf). La placa se envía poblada con componentes SMD, incluyendo el TB67H420FTG y un circuito de protección de batería inversa.
Funciones
- Controlador de motor de puente H de canal único o doble (puede conducir uno o dos motores de CC)
- Tensión de alimentación del motor: 10 V a 47 V
- Corriente de salida:
- hasta 1,7 A continuo (4,5 A pico) por motor en modo de doble canal
- hasta 3,4 A continuo (pico de 9 A) en modo de un solo canal
- El corte de corriente configurable limita activamente la corriente del motor a 4.5 A por canal (doble) o 9 A (único) de forma predeterminada; se pueden reducir con resistencias externas o fuentes de tensión
- No se necesita ninguna fuente lógica separada; las entradas son compatibles con 3V y 5V
- La interfaz de entrada flexible ofrece varias opciones de control
- Bloqueo de bajo voltaje y protección contra sobrecorriente/cortocircuito y sobretemperatura
- Detección de carga abierta
- La placa portadora añade protección de voltaje inverso de hasta 40 V
- Las salidas de error activas-bajas indican una condición de sobrecorriente, sobretemperatura o de carga abierta
- Tamaño compacto (1,0″ a 1,2″)
- Almohadilla de tierra soldable expuesta debajo del IC del controlador en la parte inferior de la placa CI
Nota: los capacitores de alimentación del motor en este portador están clasificados para 50 V; esto es menos margen que en la mayoría de nuestros conductores de motor, que tienen circuitos integrados con calificaciones de 40 V o menos. Por favor, tenga esto en cuenta si desea empujar el límite de alto voltaje de este controlador.
Hardware incluido
Este producto se suministra con todos los componentes de montaje en superficie, incluido el CI del controlador TB67H420FTG, instalado como se muestra en la imagen del producto. Sin embargo, se requiere soldadura para el montaje de las piezas de orificio pasante incluidas: un cabezal macho de 1 x 20 pines de separación de 0,1″ y tres bloques de terminales de 2 pines y 3,5 mm (para la potencia de la placa y las salidas del motor).
El cabezal macho de 0,1″ se puede romper o cortar en trozos más pequeños como se desee y se suelda en los orificios pasantes más pequeños. Estos cabezales son compatibles con placas de pan sin soldadura, conectores hembra de 0,1″y nuestros cables de puente premium y pre-crimpados. Los bloques de terminales se pueden soldar en los orificios más grandes para permitir conexiones temporales convenientes de cables de alimentación y motor sin terminar (ver nuestro vídeo corto sobre la instalación de bloques de terminales). También puede soldar sus cables de motor y otras conexiones directamente a la placa para la instalación más compacta.
|
|
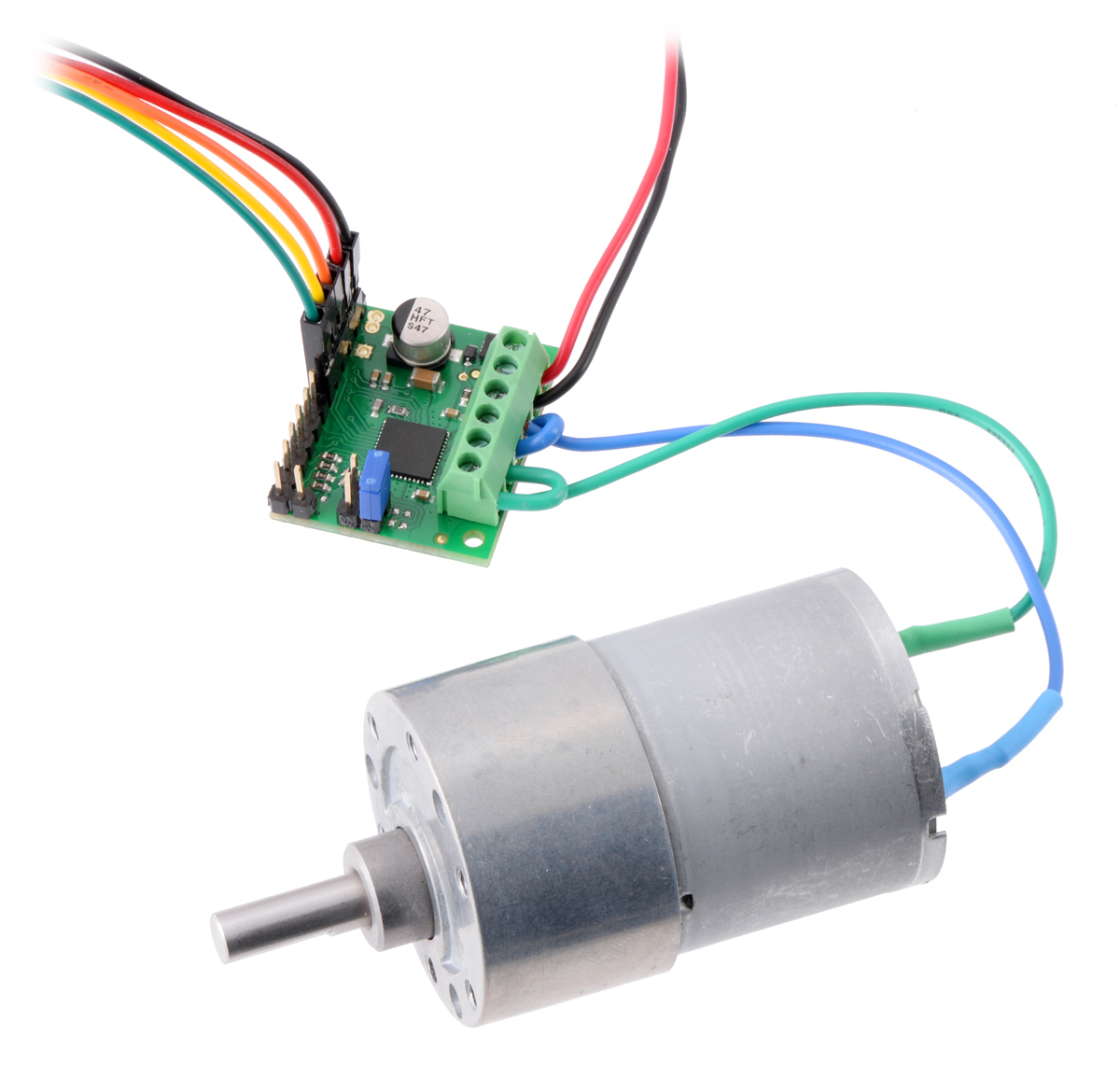
Uso del controlador del motor
Las conexiones de motor y de potencia se realizan en un lado de la placa y las conexiones de control se realizan en el otro. El controlador requiere una tensión de funcionamiento entre 10 V y 47 V para ser suministrada a la entrada de energía, VIN. Esta entrada está protegida contra inversamente hasta 40 V, y el pin de máquina virtual proporciona un acceso conveniente a la tensión de alimentación protegida contra reversión.
En una aplicación típica, se utilizan tres conexiones para controlar cada canal del conductor del motor: INx1 e INx2 para ajustar la dirección del motor y PWMx para ajustar la velocidad, lo que resulta en la operación del freno de transmisión. La siguiente tabla de veracidad simplificada muestra cómo funciona el controlador con este método de control:
| TB67H420FTG tabla de verdad simplificada | |||||
|---|---|---|---|---|---|
| Entradas | Salidas | Operación | |||
| INx1 | INx2 | PWMx | x+ | x- | |
| 1 | 0 | Pwm | PWM (H/L) | L | avance/freno a velocidad PWM % |
| 0 | 1 | L | PWM (H/L) | marcha atrás/freno a velocidad PWM % | |
| 1 | 0 | 0 | L | L | freno bajo (salidas cortas a tierra) |
| 0 | 1 | ||||
| 1 | 1 | X | |||
| 0 | 0 | X | Z | Z | costa (salidas flotantes/desconectadas) (en espera si todas las entradas IN y PWM son bajas) |
Observe el caso especial cuando las seis entradas de control (INA1, INA2, PWMA, INB1, INB2 y PWMB) son bajas: esto pone el controlador en un modo de espera de menor potencia y borra cualquier error activo.
Alternativamente, las líneas de control se pueden reducir a dos pines por canal si las señales PWM se aplican directamente a INx1 e INx2 con PWMx mantenido alto; esto permite la operación de accionamiento/freno o de accionamiento/costa, dependiendo de si la entrada que no es PWMed se mantiene alta o baja, respectivamente. (Tenga en cuenta que lograr la operación de accionamiento/freno con este método requiere señales PWM invertidas; es decir, con un PIN IN PWMed y el otro alto, el motor conducirá mientras la señal PWM es baja y frena mientras es alta.) La tabla completa de la verdad a continuación muestra todas las combinaciones posibles de las entradas y las salidas del controlador que producen:
| TB67H420FTG tabla completa de la verdad | |||||
|---|---|---|---|---|---|
| Entradas | Salidas | Operación | |||
| PWMx | INx1 | INx2 | x+ | x- | |
| 0 | 0 | 0 | Z | Z | costa (en espera si todas las entradas IN y PWM son bajas) |
| 1 | 0 | L | L | freno bajo | |
| 0 | 1 | ||||
| 1 | 1 | ||||
| 1 | 0 | 0 | Z | Z | Costa |
| 1 | 0 | H | L | Adelante | |
| 0 | 1 | L | H | Marcha atrás | |
| 1 | 1 | L | L | freno bajo | |
De forma predeterminada, el TB67H420FTG se ejecuta en modo de doble canal y conduce dos motores de forma independiente, pero opcionalmente se puede configurar para que se ejecute en un modo de canal único paralelo, en el que puede entregar aproximadamente el doble de la corriente a un solo motor. Para seleccionar el modo de un solo canal, conecte el pin HBMODE a una lógica de alto voltaje; el pasador adyacente VCC proporciona un lugar conveniente para hacerlo, ya sea con una pieza corta de alambre o con pasadores de cabezal macho y un bloque de cortocircuito de 0.1 “.
En el modo de un solo canal, los pines A+ y A deben conectarse para formar una salida de motor, y B+ y B deben conectarse para formar el otro. Las entradas A controlan el motor y no se utilizan las entradas B; el controlador entra en modo de espera cuando las tres entradas de control A son bajas.
|
|

El TB67H420FTG puede detectar varios estados de error (error) que informa conduciendo uno o ambos pines LO bajos (la hoja de datos describe lo que significa cada combinación de LO1 y LO2). De lo contrario, estos pines son llevados hacia arriba a VCC (5 V) por la placa. Los errores se bloquean, por lo que las salidas permanecerán desactivadas y las marcas de error permanecerán afirmadas hasta que se borre el error alternando el modo de espera o desconectando la alimentación del controlador.
Pinout
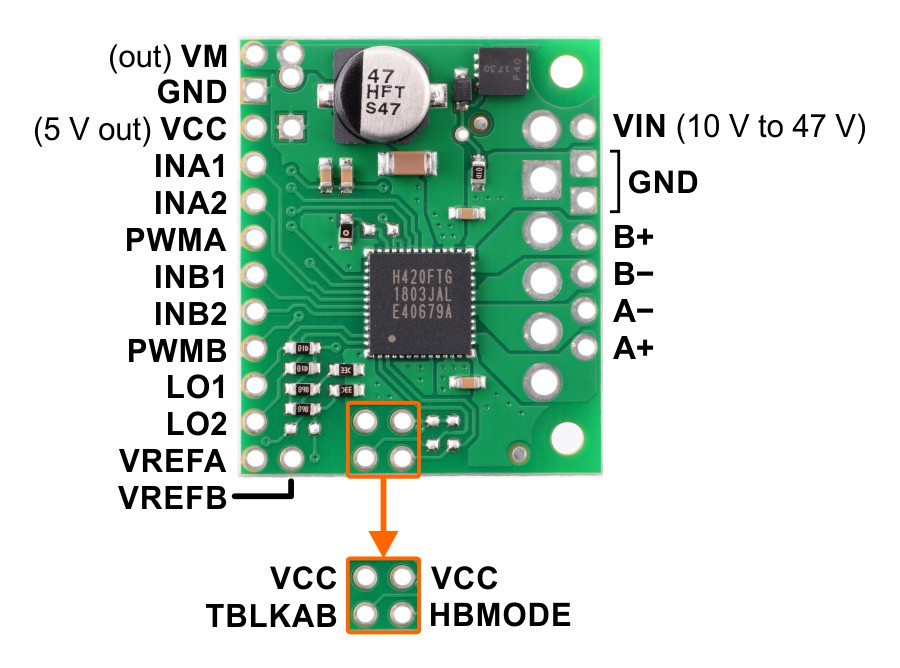 |
| Diagrama de pinout del portador de controlador de motor dual/único TB67H420FTG. |
|---|
| anclar | Estado predeterminado | Descripción – modo de doble canal (HBMODE – LOW) |
Descripción – Modo de canal único (HBMODE – HIGH) |
|---|---|---|---|
| Vin | Entrada de fuente de alimentación de placa de 10 V a 47 V (protegida atrás hasta 40 V). | ||
| Gnd | Puntos de conexión a tierra para el motor y los suministros lógicos. La fuente de control y el conductor del motor deben compartir un terreno común. | ||
| Vm | Estos pines dan acceso a la fuente de alimentación del motor después del MOSFET de protección de voltaje inverso (consulte el esquema de la placa a continuación). Se pueden utilizar para suministrar energía de protección inversa a otros componentes del sistema. La máquina virtual está generalmente diseñada como una salida, pero también se puede utilizar para suministrar energía de la placa, y algunos de los orificios VM y GND están espaciados para la adición de un condensador de orificio pasante opcional. | ||
| A+ | Salida motorA A +. | Salida del motor A (conectar entre sí). | |
| A- | Salida del motor A. | ||
| B+ | Salida del motor B +. | Salida del motor B (conectar entre sí). | |
| B- | Salida del motor B. | ||
| VCC | Salida regulada de 5 V:este pin da acceso a la tensión del regulador interno del TB67H420FTG. El regulador sólo puede proporcionar unos pocos miliamperios, por lo que la salida VCC sólo debe utilizarse para entradas lógicas en la placa, no para alimentar dispositivos externos. | ||
| INA1 | Bajo | Entrada de control para A+. PWM se puede aplicar a este pin (normalmente hecho con PWMA alto). | Entrada de control para A+ y A. PWM se puede aplicar a este pin (normalmente hecho con PWMA alto). |
| INA2 | Bajo | Entrada de control para A. PWM se puede aplicar a este pin (normalmente hecho con PWMA alto). | Entrada de control para B+ y B. PWM se puede aplicar a este pin (normalmente hecho con PWMA alto). |
| PWMA | Bajo | Entrada PWM para el canal A. | Entrada PWM. |
| INB1 | Bajo | Entrada de control para B+. PWM se puede aplicar a este pin (normalmente hecho con PWMB alto). | No se usa. |
| INB2 | Bajo | Entrada de control para B. PWM se puede aplicar a este pin (normalmente hecho con PWMB alto). | No se usa. |
| PWMB | Bajo | Entrada PWM para el canal B. | No se usa. |
| LO1 | Alto | Salida de error 1: se reduce cuando se produce un fallo de sobrecorriente o sobretemperatura. De lo contrario, la placa tira de este pin hasta VCC. | |
| Lo2 | Alto | Salida de error 2: se reduce cuando se produce un error de carga abierta o sobretemperatura. De lo contrario, la placa tira de este pin hasta VCC. | |
| VREFA | Referencia de umbral de corte actual para el canal A. | Referencia de umbral de corte actual. | |
| VREFB | Referencia de umbral de corte actual para el canal B. | No se usa. | |
| TBLKAB | Bajo | Entrada de configuración de tiempo de vaciado (consulte la hoja de datos). Esta entrada no debe cambiarse mientras la placa está encendida. | |
| HBMODE | Bajo | Entrada de configuración del modo de accionamiento del puente H: LOW selecciona el modo de doble canal; HIGH selecciona el modo de un solo canal. Esta entrada no debe cambiarse mientras la placa está encendida. | |
Limitación de corriente
El TB67H420FTG puede limitar activamente la corriente a través de los motores mediante el uso de una regulación de corriente PWM de frecuencia fija (corte actual). Esta placa portadora conecta divisores de voltaje a los pines VREFA y VREFB que establecen la tensión de referencia en aproximadamente 3,6 V.
En el modo de canal dual, esto da como resultado un límite de corriente nominal de 4,5 A por canal. Puede reducir el límite para cada canal de motor añadiendo una resistencia entre el pin VREF correspondiente y GND, o puede aplicar una tensión (3,6 V máx.) directamente al pin VREF. La fórmula para los umbrales de corte actuales en modo de doble canal es Iout= VREF1,25 Yodes salida-VREF-1.25.
En el modo de canal único, la tensión de referencia predeterminada de 3,6 V da como resultado un límite de corriente nominal de un solo canal de 9 A. La fórmula para el umbral de corte actual en modo de canal único es .Yohacia fuera= VREF2,5 Yodes salida-VREF-2,5
Consideraciones de disipación de energía en el mundo real
La hoja de datos TB67H420FTG recomienda una corriente continua máxima de 4,5 A, y esta placa portadora limita la corriente del motor a la misma cantidad. Sin embargo, el chip por sí mismo normalmente se sobrecalentará a las corrientes más bajas. En nuestras pruebas, encontramos que el chip era capaz de entregar 4.5 A por canal durante sólo unos segundos antes de que la protección térmica del chip se iniciara y inhabilitara las salidas del motor; una corriente continua de aproximadamente 1,7 A por canal fue sostenible durante muchos minutos sin desencadenar un apagado térmico. Conducir sólo un canal a la vez aumenta la corriente sostenible a casi 2,5 A por canal, y en modo de un solo canal, el controlador puede entregar alrededor de 3,4 A continuamente sin sobrecalentamiento.
La corriente real que puede entregar dependerá de lo bien que pueda mantener el controlador del motor fresco. La placa de circuito impreso del portador está diseñada para ayudar con esto extrayendo calor del chip del conductor del motor. PWMing el motor introducirá calefacción adicional proporcional a la frecuencia.
Este producto puede calentarse lo suficiente como para quemarte mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Diagrama esquemático
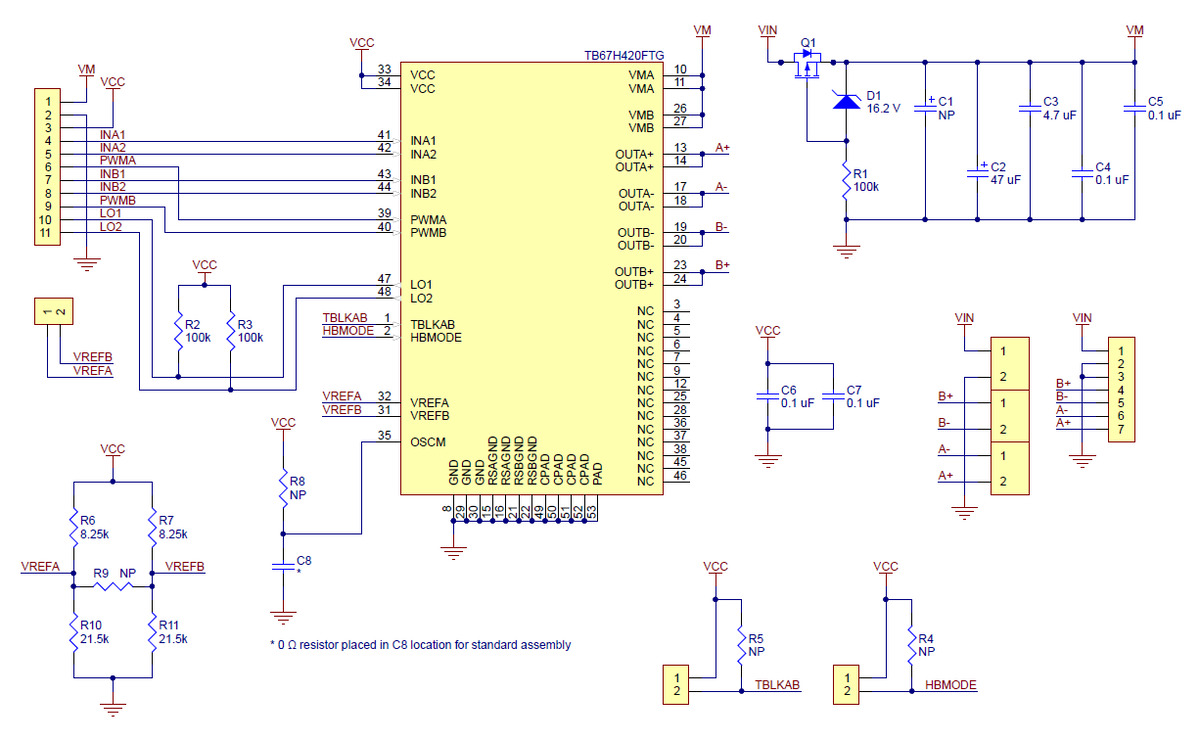 |
| Diagrama esquemático del portador de controlador de motor dual/único TB67H420FTG. |
|---|



Valoraciones
No hay valoraciones aún.