




MICRO SENSOR REFLECTIVO INFRARROJO DE LINEA ML1 JSUMO
$4,49
Sensor de micro línea para usar en áreas muy estrechas. Se puede utilizar para micro robots de sumo, mini y mega sumo como detección de borde (línea blanca). También es adecuado para robots seguidores de línea.
4 disponibles
Descripción
Sensor de micro línea para usar en áreas muy estrechas. Se puede utilizar para micro robots de sumo, mini y mega sumo como detección de borde (línea blanca). También es adecuado para robots seguidores de línea.
Características
Proporciona una salida analógica limpia en superficies en blanco y negro desde 2-3 mm de altura desde la superficie. (Se puede usar en entradas digitales)
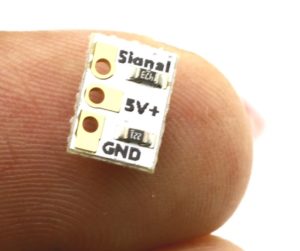
Dimensiones 8,60 x 6,00 x 3,15 mm. (¡El más pequeño!)
0.2 gramos (el más ligero)
Marca limpia en ambos lados. La placa del sensor es muy pequeña, pero puede leer los nombres de los pines con mucha claridad.
En comparación con el QTR1A de la marca Pololu, le brinda el mayor beneficio. ¡Talla! Por favor mira a la imagen inferior.
La huella ML1 es 51,6 mm ^ 2, la huella QTR1A es 96,8 mm ^ 2 casi la mitad de tamaño más pequeño.
¿Cómo usará el Micro Line Sensor?
Nuestro sensor (ML1) proporciona datos casi limpios con superficies en blanco y negro debido al alto contraste. Con ese factor, puede usar directamente Ml1 con cualquier pin de E / S digital en el controlador basado en Arduino, PIC o ARM (también funciona a 3.3V y 5V como de costumbre).
Los pines digitales tienen un voltaje de umbral de 2.5 voltios, lo que significa que cualquier voltaje más alto de 2.5V será detectado por el microcontrolador mediante la lógica 1 y menos voltaje que 1-1.5V se sentirá como lógica 0. Entonces, cuando ML1 cuando dé 4.5 voltios, se entenderá por mcu como una lógica 1.
Entonces, para Arduino, solo use esta declaración para mirar la salida del sensor, le dará 0 o 1 de acuerdo con la superficie blanca o negra del sensor.
int ML1 = 13; // Connected to Digital 13, any digital pinis ok.
int sensorValue = digitalRead(ML1);
La segunda opción es usar entradas analógicas del controlador. Con la lectura analógica podemos hacer que el reconocimiento de blanco y negro sea más seguro. (El más adecuado para robots de sumo, puede programar como debajo de 1V es una superficie blanca, más alta es negra, puede decir)
Entonces, la declaración de lectura analógica será:
int ML1 = A0; // Connected to Analog 0 , any analog pin is ok.
int sensorValue = analogRead(ML1);
Sugerimos ML1 para todos los proyectos de robots que necesitan propósitos de detección de línea.


Valoraciones
No hay valoraciones aún.