Descripción
Visión general
Este conjunto incluye placas de sensores y ruedas reflectantes para añadir codificación de cuadratura a dos motores de micro metal con ejes traseros extendidos (los motores no están incluidos en este kit). Las ruedas encoder de 3 y 5 dientes se incluyen para proporcionar opciones de 12 recuentos por revolución y 20 recuentos por revolución del eje del motor (para calcular los recuentos del codificador por revolución de la salida de la caja de cambios, multiplicar por la relación de engranajes).
Nota: Este sistema de sensores está diseñado para usuarios relativamente avanzados cómodos con la instalación del codificador físico y con el uso de las señales resultantes. Sólo funciona con motores de engranajes micro metal que tienen ejes traseros extendidos.
Pinout e instalación
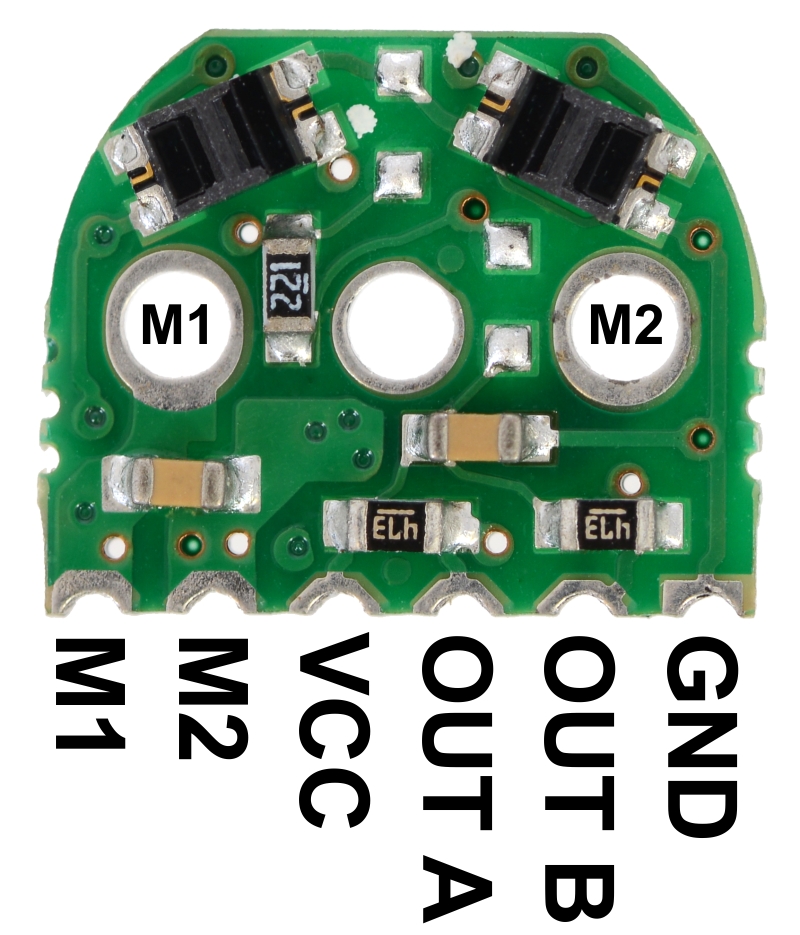
La placa del codificador está diseñada para ser soldada directamente a la parte posterior del motor, con el eje posterior del motor sobresaliendo a través del agujero en el centro de la placa de circuito. Cuanto mejor alineada sea la placa, mejor será la calidad de la señal de salida. Una manera de lograr una buena alineación es pegar la placa a un pasador del motor y soldar el otro pasador sólo cuando la placa está bien alineada. Tenga cuidado de evitar el calentamiento prolongado de los pasadores del motor, que podrían deformar la tapa del extremo de plástico del motor o los cepillos del motor. Una vez que la placa se suelda a los dos terminales, los cables del motor están conectados a las almohadillas M1 y M2 a lo largo del borde de la placa, junto con la potencia para los sensores y las dos salidas de cuadratura:
Las conexiones de borde están en un paso de 2 mm. La placa se puede soldar perpendicularmente a otra PCB, a un conector de 2 mm o a cables individuales como se muestra aquí:
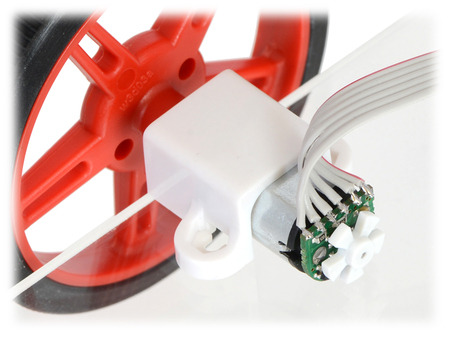 |
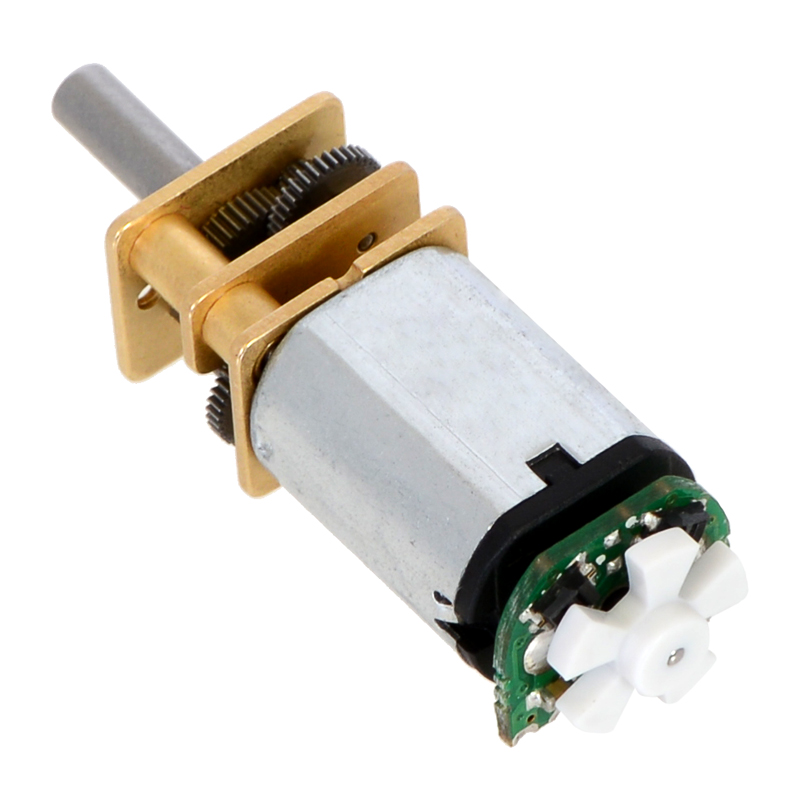
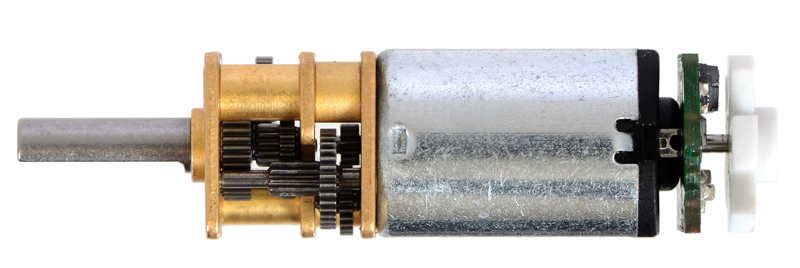
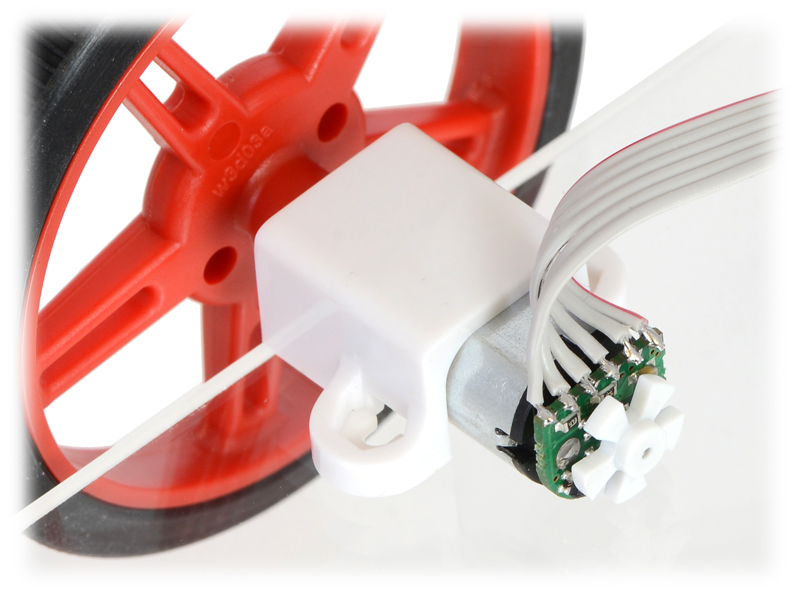
| Ejemplo de un codificador óptico reflectante motor de engranajes microbobosel instalado. |
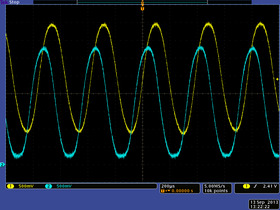
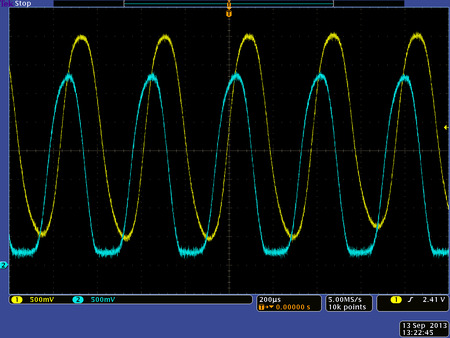
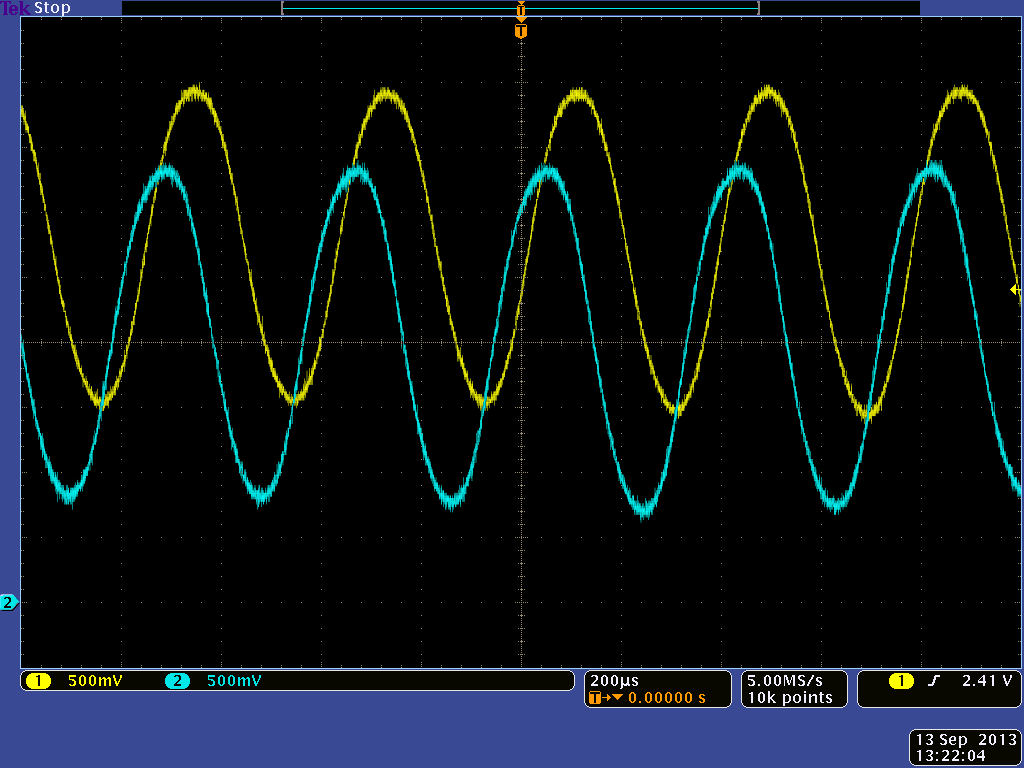
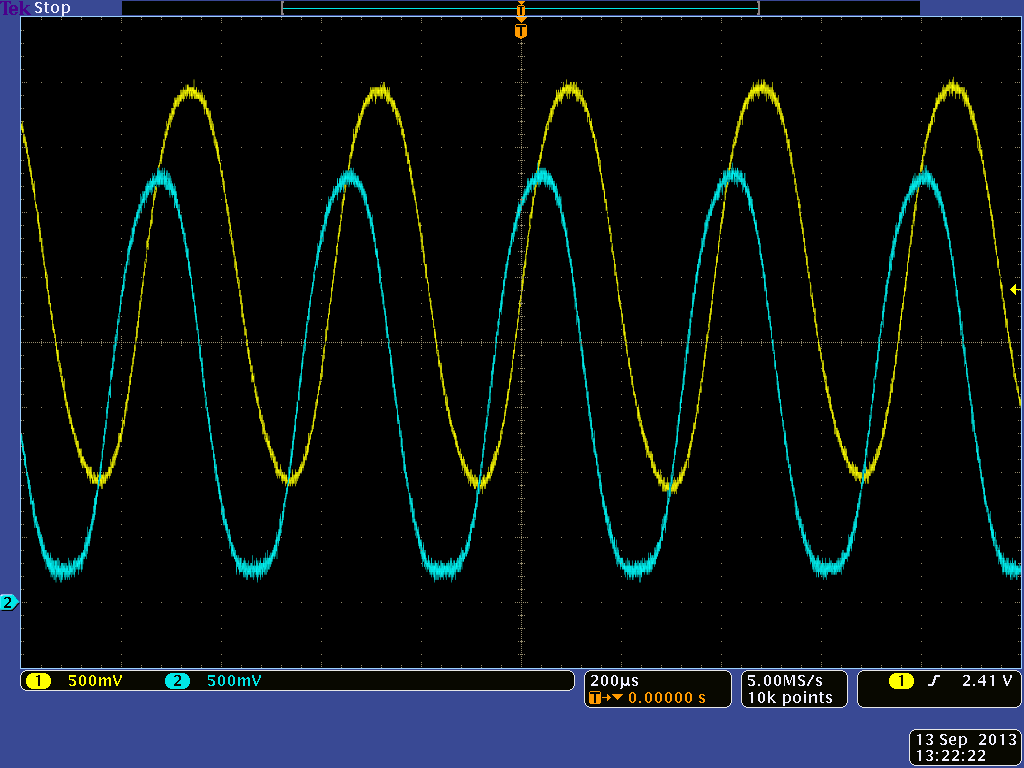
Una vez que la placa está soldada al motor, la rueda del codificador de plástico se puede empujar sobre el eje del motor. La rueda del codificador debe ser empujada lo suficientemente lejos como para que el espacio entre la rueda y los sensores sea de aproximadamente 0,5 mm. Una forma de obtener espacios consistentes es utilizar unas hojas de papel o una tarjeta de visita como una cuña al instalar la rueda del codificador. La mejor manera de confirmar la colocación óptima de la rueda del codificador es mirar la señal con un osciloscopio. La siguiente secuencia de capturas de pantalla muestra la salida de una rueda de 5 dientes girando a aproximadamente 30.000 RPM a medida que la rueda se acerca cada vez más a los sensores.
 |
| Versión de codificador de 5V, motor aprox. 30k RPM: rueda de 5 dientes demasiado lejos de los sensores. |
|
 |
| Versión de codificador de 5V, motor aprox. 30k RPM: rueda de 5 dientes ligeramente demasiado lejos de los sensores. |
|
 |
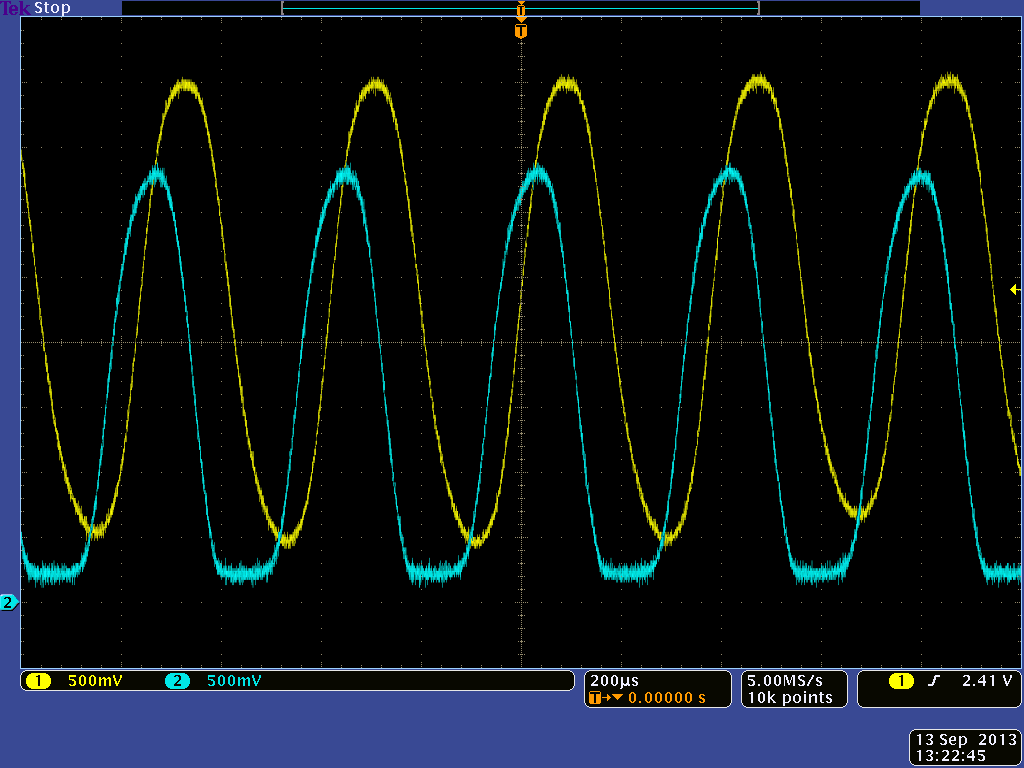
| Versión de codificador de 5V, motor aprox. 30k RPM: rueda de 5 dientes a una distancia óptima de los sensores. |
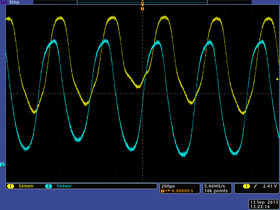 |
| Versión de codificador de 5V, motor aprox. 30k RPM: rueda de 5 dientes ligeramente demasiado cerca de los sensores. |
|
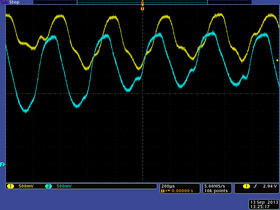 |
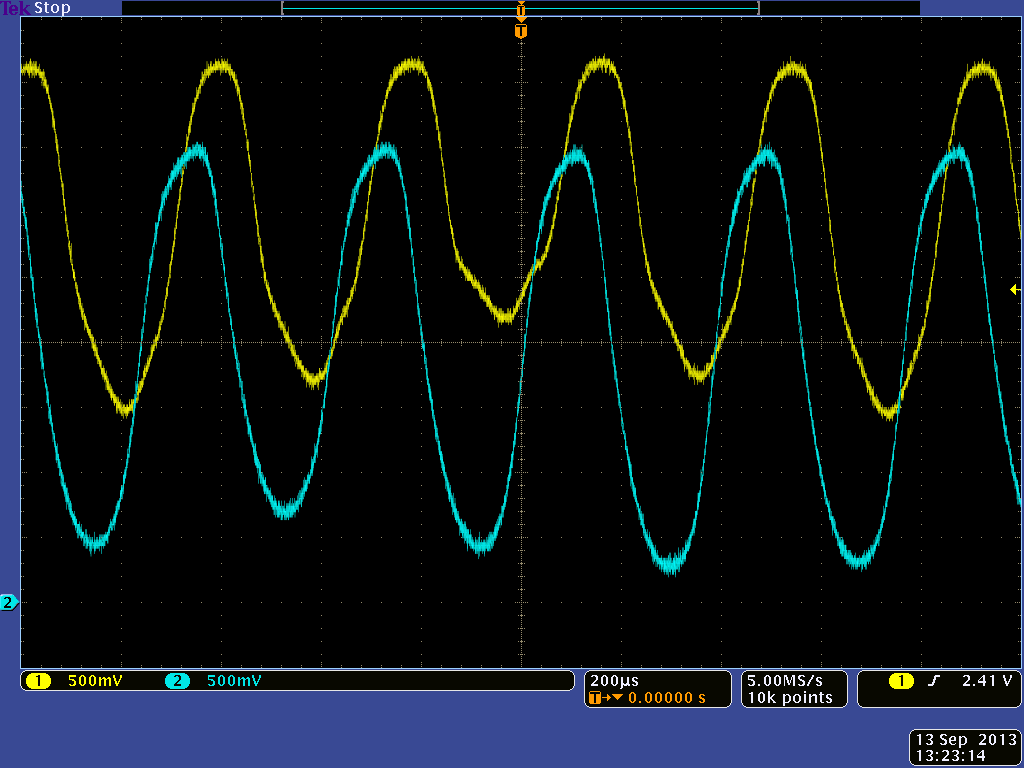
| Versión de codificador de 5V, motor aprox. 30k RPM: rueda de 5 dientes demasiado cerca de los sensores. |
|
La captura del osciloscopio central anterior muestra cómo se ven las salidas de señal con la rueda montada a una distancia óptima de los sensores. Tenga en cuenta que incluso en este caso óptimo, las señales de los dos canales son diferentes debido a las variaciones inherentes en los dos sensores de reflectancia, pero ambas señales están 90o fuera de fase y ambos abarcan un amplio rango de voltaje.
Con el acondicionamiento de señal adecuado (por ejemplo, comparadores con histéresis), todas las salidas, excepto tal vez para el último caso, seguirían produciendo recuentos de posición fiables. Las salidas también tienden a mejorar a velocidades más bajas y con la rueda de 3 dientes.
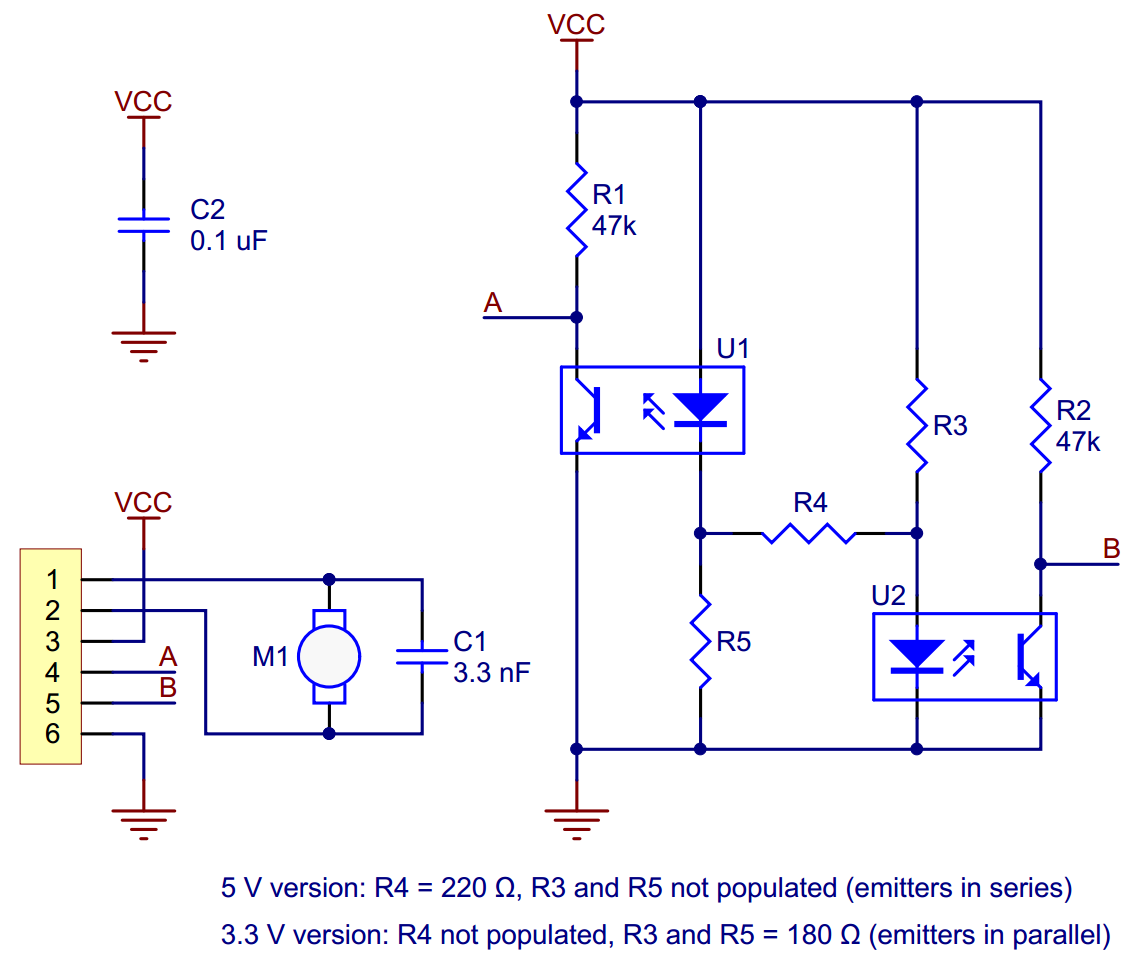
Versiones de 5V y 3.3V
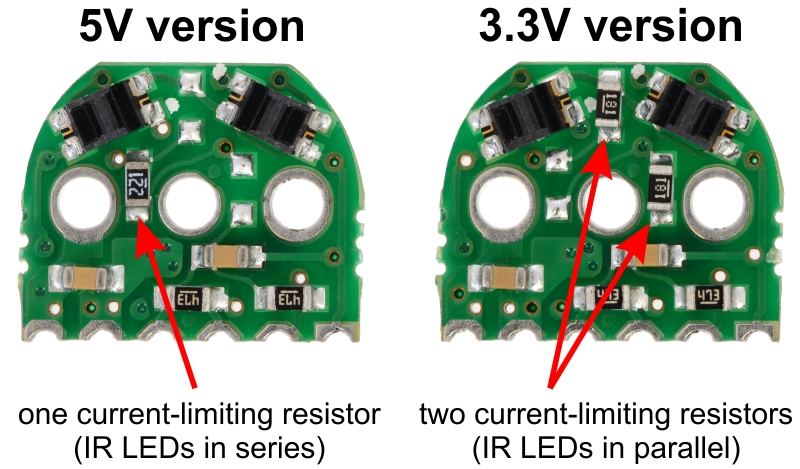
Las placas encoder están disponibles en dos versiones optimizadas para su funcionamiento a 5,0 V y 3,3 V. La única diferencia está en la configuración eléctrica de los LED IR en los sensores de reflectancia:
La versión de 5 V con LEDs en serie dibuja aproximadamente 12 mA; la versión de 3.3 V con LEDs en paralelo dibuja aproximadamente 24 mA.
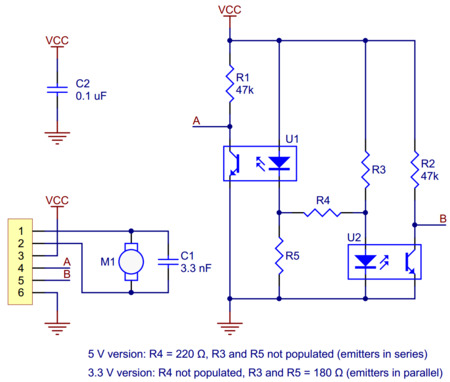 |
| Diagrama esquemático para el codificador óptico reflectante motor de engranajes micro metal. |











Valoraciones
No hay valoraciones aún.