











MOTORREDUCTOR POLOLU 25Dx63L MM HP 12V 9,7:1 CON ENCODER 48 CPR #4842 POLOLU
$59,99
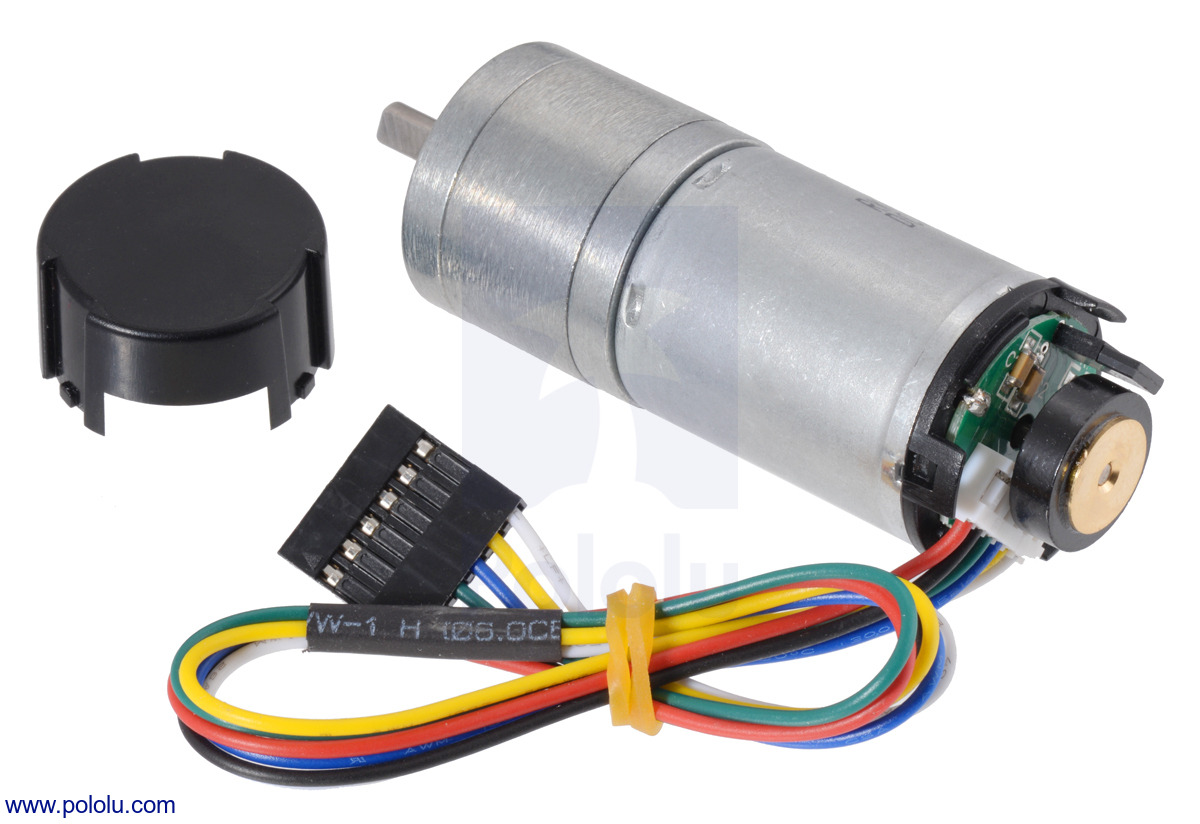
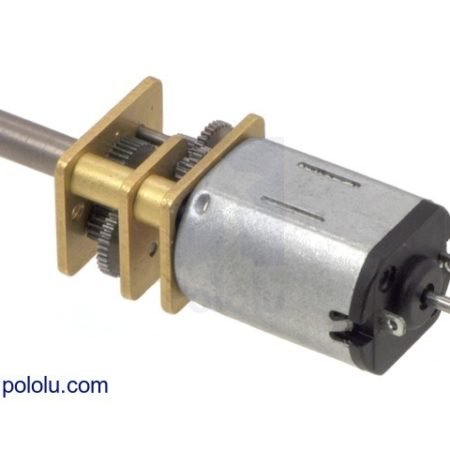
Este motorreductor consta de un motor de CC con escobillas de 12 V de alta potencia combinado con una caja de engranajes de dientes rectos de metal de 9,68:1 y tiene un codificador de cuadratura de 48 CPR integrado en el eje del motor, que proporciona 464,64 conteos por revolución del eje de salida de la caja de engranajes. El motorreductor es cilíndrico, con un diámetro de poco menos de 25 mm, y el eje de salida en forma de D tiene un diámetro de 4 mm y se extiende 12,5 mm desde la placa frontal de la caja de cambios. Este motorreductor también está disponible sin encoder .
Especificaciones clave:
| Voltaje | rendimiento sin carga | extrapolación de parada |
|---|---|---|
| 12 voltios | 1000 RPM, 300mA | 3,9 kg⋅cm (54 oz⋅in), 5,0 A |
2 disponibles
Descripción
Visión general
Estos motores de CC cepillados cilíndricos están disponibles en una amplia gama de relaciones de engranajes y con cinco motores diferentes (dos niveles de potencia de motores de 6 V y tres niveles de potencia de motores de 12 V). Todos los reductores tienen la misma caja de 25 mm de diámetro y el eje de salida de la caja de cambios de 4 mm de diámetro, por lo que generalmente es fácil cambiar una versión por otra si cambian los requisitos de diseño (aunque la longitud de la caja de cambios tiende a aumentar con la relación de engranajes). La parte del motor y del codificador está disponible por sí misma (sin caja de cambios) para cada combinación de nivel de potencia y voltaje de funcionamiento nominal, y también están disponibles versiones sin el codificador. Consulte la tabla de comparación de motores de engranajes metálicos 25D para conocer las especificaciones detalladas de todos nuestros motores de engranajes metálicos 25D. Esta tabla dinámicamente clasificable puede ayudarle a encontrar la versión que ofrece la mejor combinación de velocidad, par y dibujo actual para su aplicación en particular. Una tabla de comparación más básica está disponible a continuación:
| Tensión nominal |
Tipo de motor | Estancamiento
de corriente – Voltaje nominal |
Velocidad sin carga – Voltaje nominal |
Par de establo aproximado – Voltaje nominal |

Con encoder |

Sin codificador |
|---|---|---|---|---|---|---|
| 12 V | alta potencia (HP) |
5.6 A | 10.200 RPM | 5.5 oz-in | 1:1 HP 12V w/encoder | |
| 2250 RPM | 23 oz-in | 4.4:1 HP 12V w/codificador | 4.4:1 HP 12V | |||
| 1030 RPM | 44 oz-in | 9.7:1 HP 12V w/codificador | 9.7:1 HP 12V | |||
| 500 RPM | 85 oz-in | 20.4:1 HP 12V w/encoder | 20.4:1 HP 12V | |||
| 290 RPM | 120 oz-in | 34:1 HP 12V w/encoder | 34:1 HP 12V | |||
| 210 RPM | 165 oz-in | 47:1 HP 12V w/encoder | 47:1 HP 12V | |||
| 130 RPM | 240 oz-in | 75:1 HP 12V w/encoder | 75:1 HP 12V | |||
| 100 RPM | 300 oz-in | 99:1 HP 12V w/encoder | 99:1 HP 12V | |||
Nota: Los motores de engranajes que se detienen o sobrecargan pueden disminuir considerablemente su vida útil e incluso provocar daños inmediatos. Para estas cajas de cambios, el límite superior recomendado para par instantáneo es de 15 kg-cm (200 oz-in); recomendamos encarecidamente mantener las cargas aplicadas muy por debajo de este límite. Los establos también pueden resultar en daños térmicos rápidos (potencialmente en el orden de un segundo) en los bobinados y cepillos del motor, especialmente para las versiones que utilizan motores de alta potencia (HP); una recomendación general para el funcionamiento del motor de CC cepillado es del 25% o menos de la corriente del establo.
En general, este tipo de motores pueden funcionar a voltajes por encima y por debajo de sus voltajes nominales (pueden comenzar a girar a voltajes tan bajos como 1 V); voltajes más bajos podrían no ser prácticos, y voltajes más altos podrían comenzar afectando negativamente la vida del motor.
Estos motores de engranajes son funcionalmente idénticos a las versiones anteriores que llevamos sin tapas de extremo (utilizan el mismo motor, codificador y cajas de cambios). La tapa del extremo de plástico negro es fácilmente extraíble si necesita acceder al codificador o desea reducir ligeramente el tamaño general del motor de engranajes, pero hay un poco de plástico base que permanecerá, como se muestra en la imagen de abajo:
 |
Detalles de la #4845 de artículos
Relación de transmisión exacta: 46. 85:1
Dimensiones
El diagrama siguiente muestra las dimensiones de la línea de motores de engranajes de 25D mm (las unidades son mm sobre [pulgadas]).
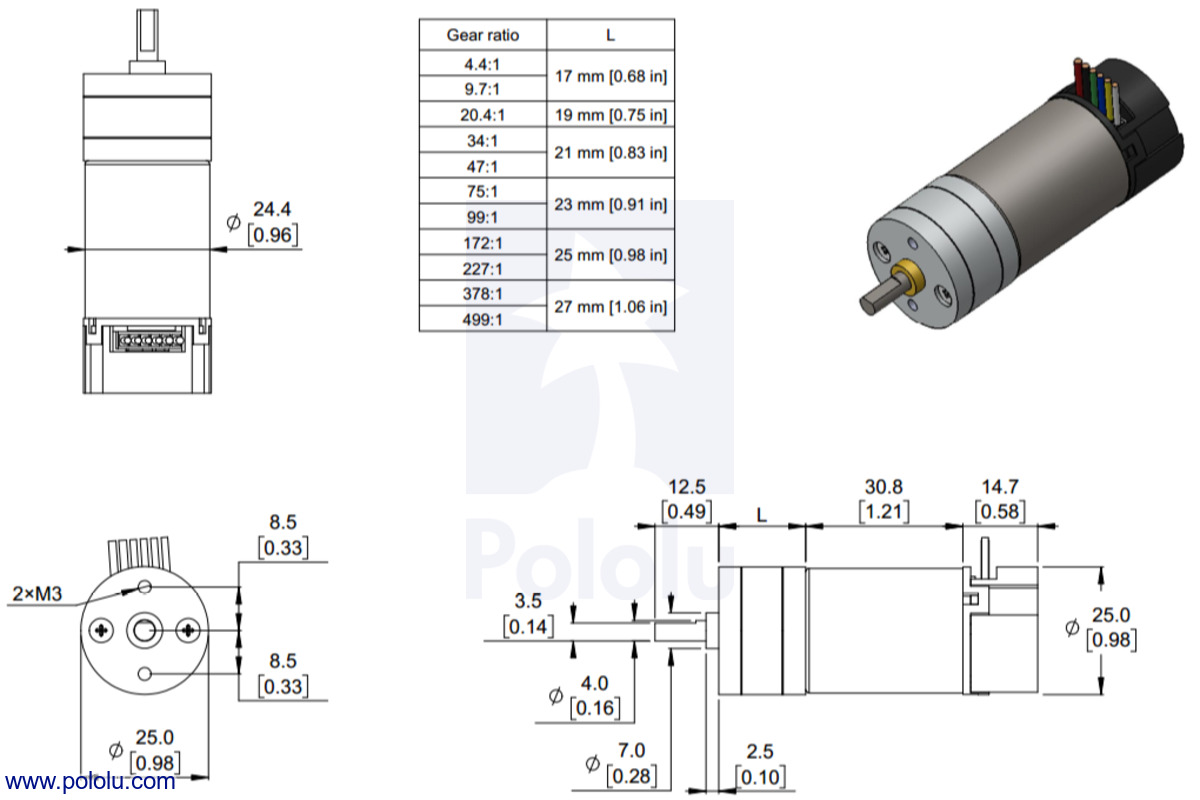 |
| Dimensiones de los motores de metal Pololu de 25D mm con encoders. Las unidades son mm sobre [pulgadas]. |
|---|
Advertencia: No atornille demasiado en los orificios de montaje, ya que los tornillos pueden golpear los engranajes. Recomendamos atornillar no más de 6 mm (0,24″) en el orificio del tornillo.
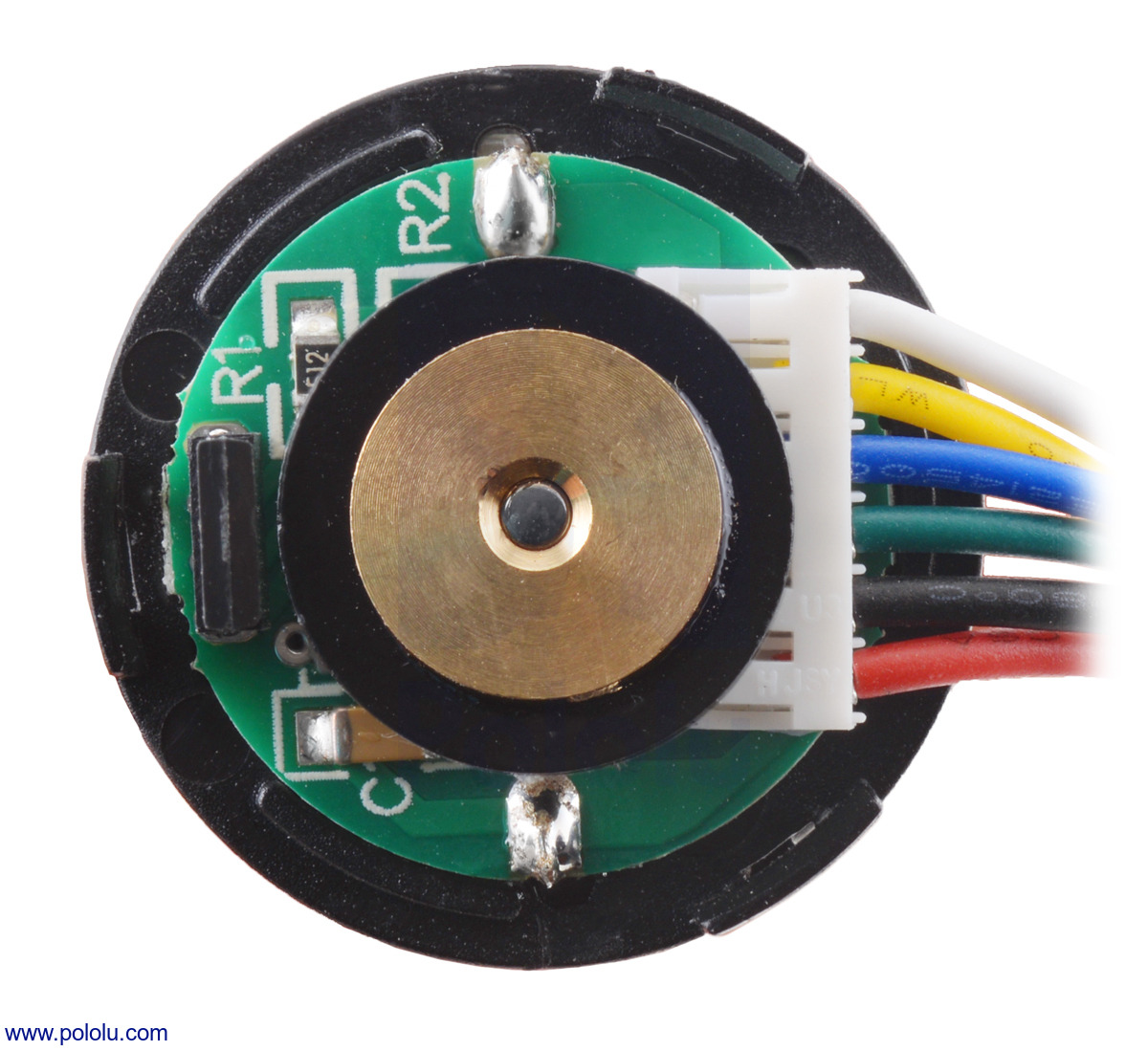 |
| Motor de engranajes metálicos de 25D mm con codificador 48 CPR (con tapa de extremo quitada). |
|---|
 |
Uso del codificador
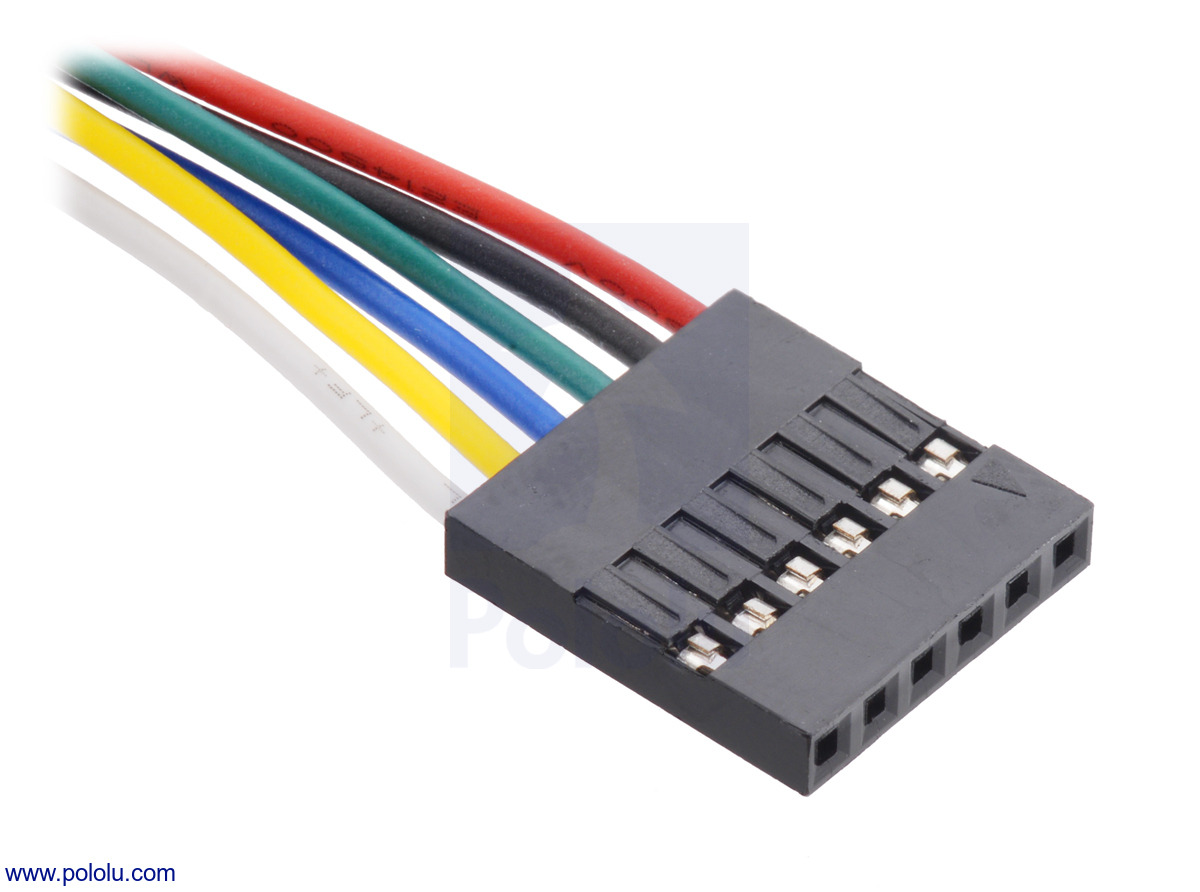
Un codificador de efecto Hall de dos canales se utiliza para detectar la rotación de un disco magnético en una protuberancia posterior del eje del motor. El codificador de cuadratura proporciona una resolución de 48 recuentos por revolución del eje del motor al contar ambos bordes de ambos canales. Para calcular los recuentos por revolución de la salida de la caja de cambios, multiplique la relación de engranajes por 48. El motor/codificador tiene seis cables codificados por colores y 8″ (20 cm) terminados por un cabezal hembra de 1 x 6 con un paso de 0,1″, como se muestra en la imagen principal del producto. Este cabezal funciona con cabezales macho estándar de 0,1″ y nuestros cables de puente y precrimpados machos. Si este encabezado no es conveniente para la aplicación, puede extraer los cables engarzados del encabezado o cortar el encabezado. En la tabla siguiente se describen las funciones de cable:
| Color | Función |
|---|---|
| Rojo | potencia del motor (se conecta a un terminal de motor) |
| Negro | potencia del motor (se conecta al otro terminal del motor) |
| Verde | codificador GND |
| Azul | encoder Vcc (3,5 V a 20 V) |
| Amarillo | codificador Salida A |
| Blanco | salida del codificador B |
El sensor Hall requiere una tensión de entrada, Vcc, entre 3,5 y 20 V y dibuja un máximo de 10 mA. Las salidas A y B son ondas cuadradas de 0 V a Vcc aproximadamente 90o fuera de fase. La frecuencia de las transiciones le indica la velocidad del motor, y el orden de las transiciones le indica la dirección. La siguiente captura de osciloscopio muestra las salidas del codificador A y B (amarillo y blanco) utilizando una tensión de motor de 6 V y un sensor Hall Vcc de 5 V:
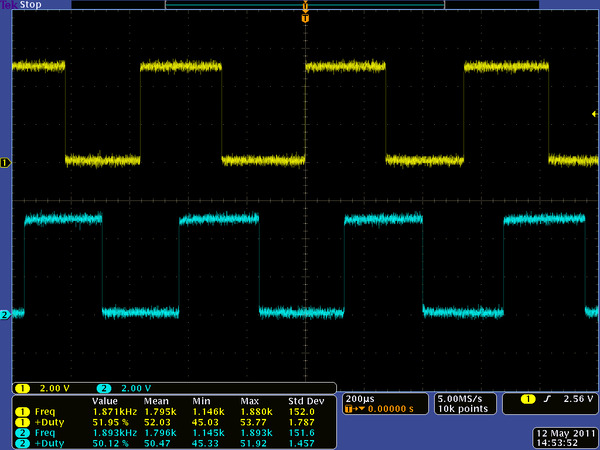 |
| Salidas encoder A y B para motor de engranajes metálicos HP 6V de 25D mm con codificador 48 CPR (motor que funciona a 6 V). |
|---|
Al contar los bordes ascendentes y descendentes de las salidas A y B, es posible obtener 48 recuentos por revolución del eje del motor. El uso de un solo borde de un canal da como resultado 12 recuentos por revolución del eje del motor, por lo que la frecuencia de la salida A en la captura del osciloscopio anterior es 12 veces la frecuencia de rotación del motor.


Valoraciones
No hay valoraciones aún.