





SHIELD CONTROLADOR DE MOTOR VNH5019 DUAL PARA ARDUINO POLOLU
$59,99
Mueva su Arduino! Este shield facilita el control de dos motores de CC de alta potencia con su placa Arduino o compatible con Arduino. Sus dos controladores de motor robustos VNH5019 operan de 5,5 a 24 V y pueden entregar 12 A continuos (pico de 30 A) por motor, o 24 A continuos (pico de 60 A) a un solo motor conectado a ambos canales. Estos excelentes controladores también ofrecen retroalimentación de detección de corriente y aceptan frecuencias PWM ultrasónicas para un funcionamiento más silencioso. Las asignaciones de pines de Arduino se pueden personalizar si los valores predeterminados no son convenientes, y las líneas de control del controlador del motor están divididas a lo largo del lado izquierdo del escudo para uso general sin un Arduino.
Agotado
Descripción
Visión general
 |
| Protector de controlador de motor Pololu dual VNH5019 para Arduino. |
|---|
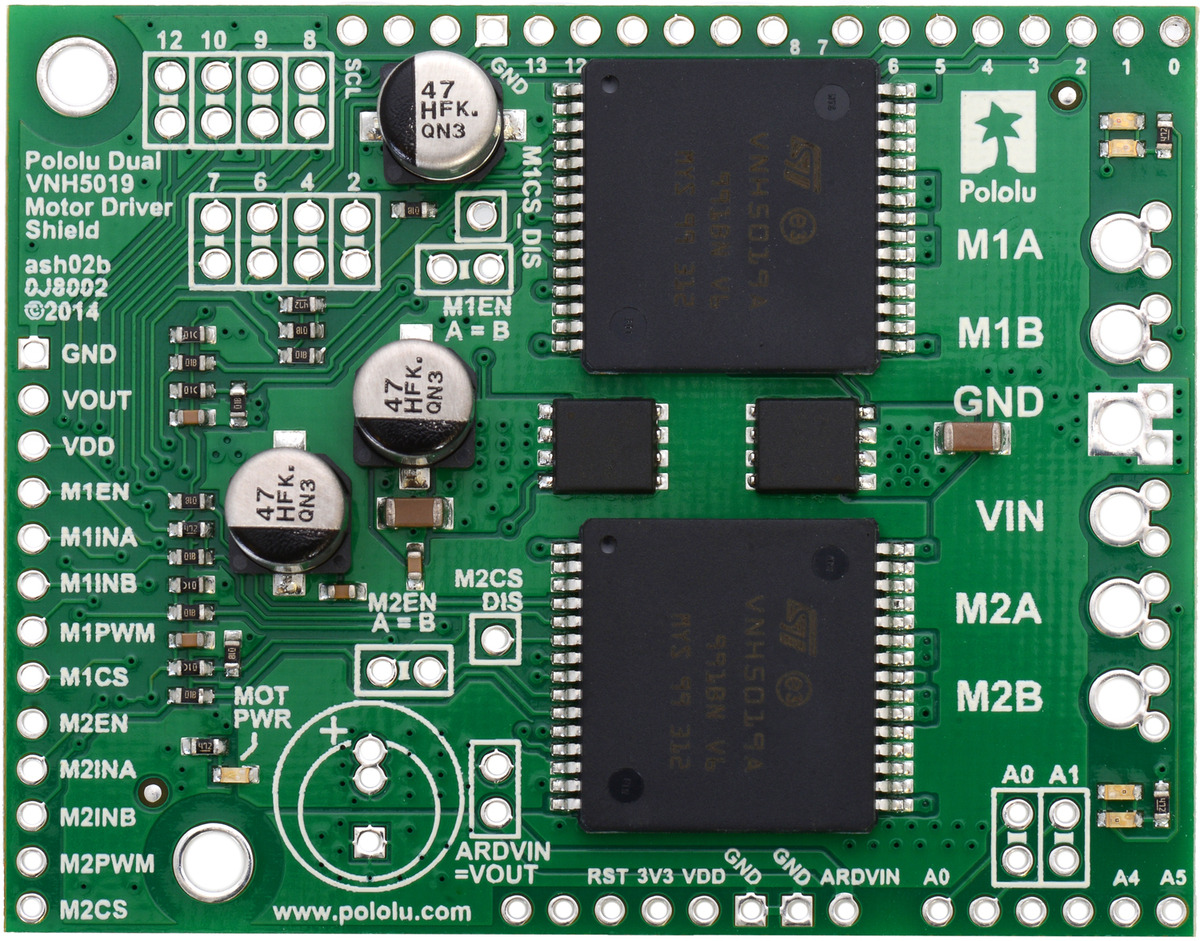
Este protector de controlador de motor y su biblioteca Arduino correspondiente facilitan el control de dos motores de CC cepillados bidireccionales de alta potencia con una placa Arduino o compatible, como la A-Star 32U4 Prime . La placa cuenta con un par de controladores de motor VNH5019 robustos de ST, que operan de 5,5 a 24 V y pueden entregar 12 A continuos (pico de 30 A) por canal, e incorpora la mayoría de los componentes del diagrama de aplicación, que incluye resistencias de pull-up y de protección y FET para protección inversa de la batería. Se envía completamente equipado con sus componentes SMD, incluidos los dos circuitos integrados VNH5019, como se muestra en la imagen de la derecha; Se incluyen encabezados y bloques de terminales Arduino apilables para conectar motores y potencia del motor, pero no están soldados (consulte la sección Hardware incluido a continuación).
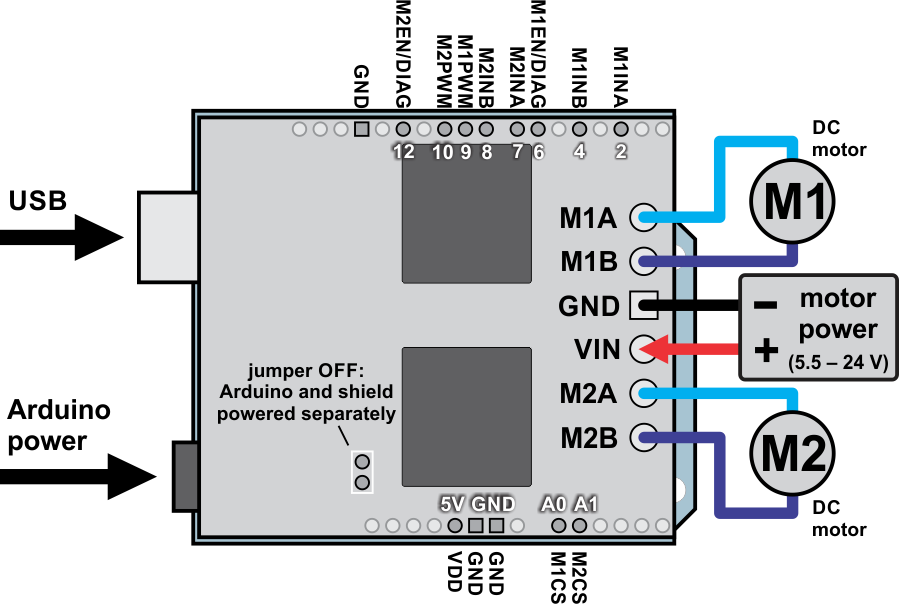
Este controlador de motor versátil está destinado a una amplia gama de usuarios, desde principiantes que solo quieren una solución de control de motor plug-and-play para sus Arduinos (y están de acuerdo con un poco de soldadura) hasta expertos que quieren interactuar directamente con el gran motor de ST. controladores de circuitos integrados. Las asignaciones de pines de Arduino se pueden personalizar si los valores predeterminados no son convenientes, y las líneas de control VNH5019 están divididas a lo largo del lado izquierdo de la placa para uso general sin un Arduino (consulte el diagrama de conexión de la derecha a continuación). Esta versatilidad, junto con la opción de alimentar el Arduino directamente desde el escudo, distingue a esta placa de los protectores de motor similares de la competencia.
|
|

Para una alternativa de menor potencia y menor costo a este protector, considere el protector de controlador de motor Dual MC33926 , que tiene un diseño muy similar y puede entregar 3 A continuos por canal.
Para los escudos de controlador de motor de alta potencia que operan a voltajes más altos y pueden entregar más corriente, consulte los escudos de controlador de motor de alta potencia Dual G2 más nuevos .
Características
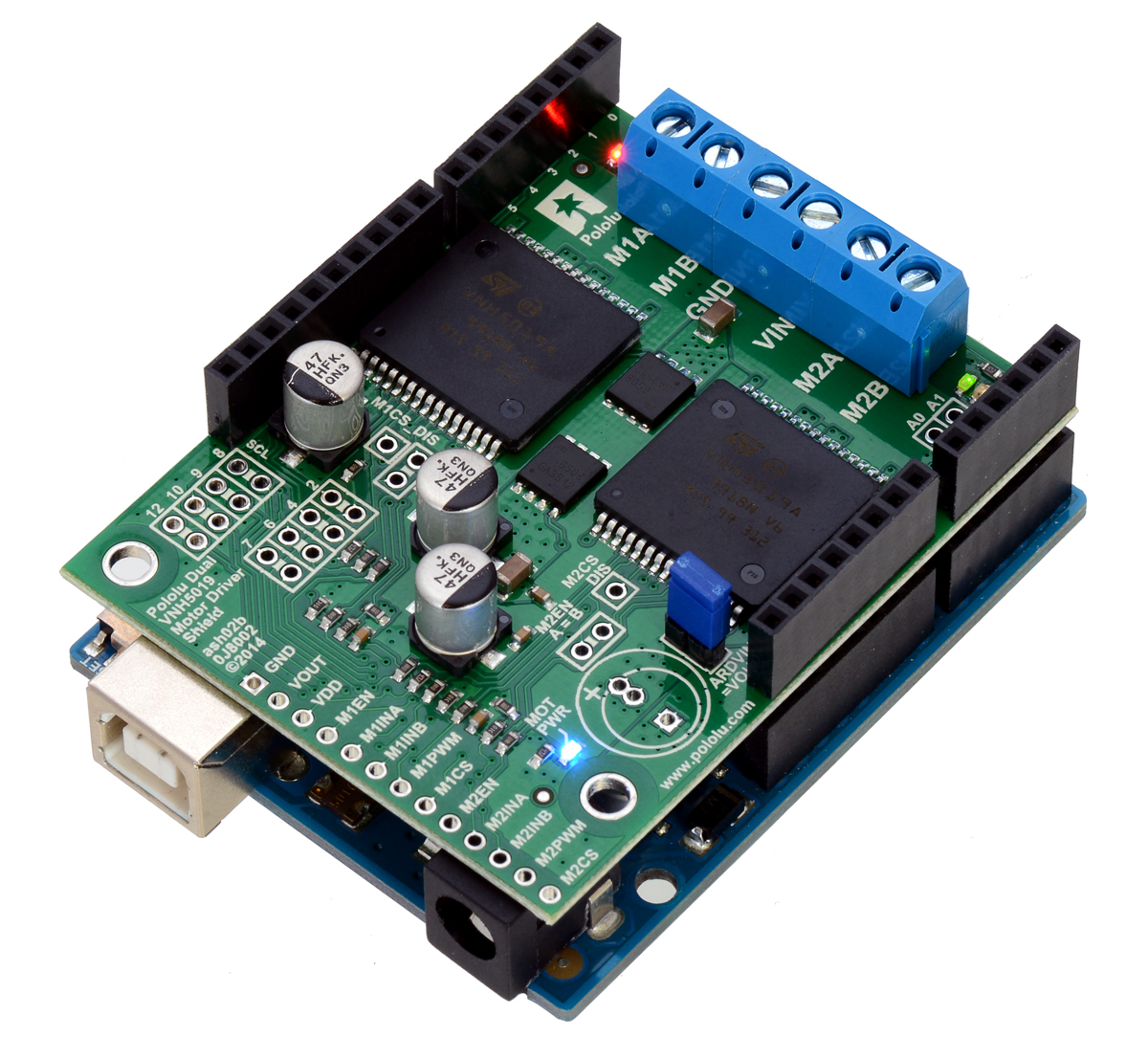 |
| Protector de controlador de motor Pololu dual VNH5019, ensamblado y conectado a un Arduino Uno R3. |
|---|
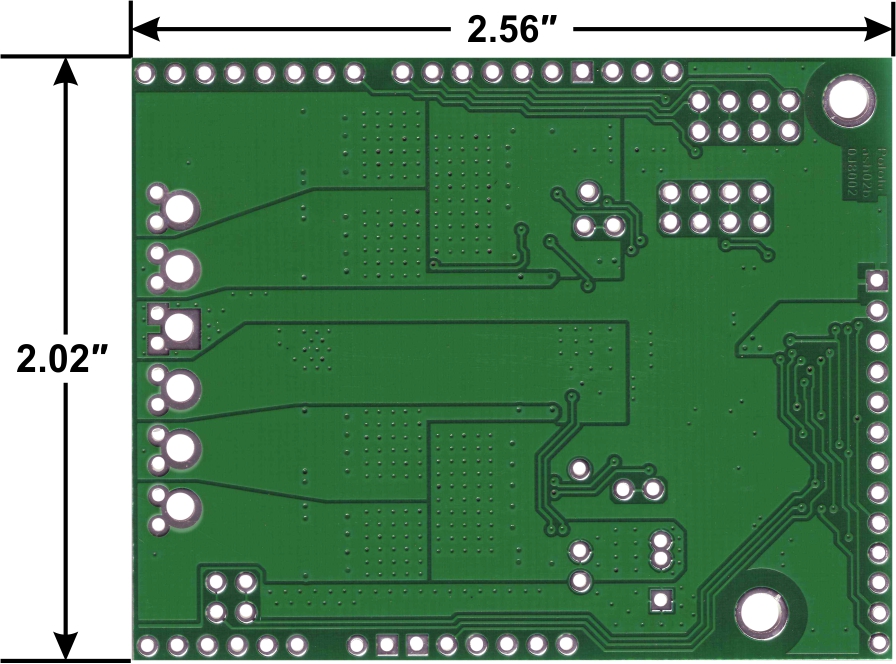 |
| Protector de controlador de motor Pololu dual VNH5019 para Arduino, vista inferior con dimensiones de placa. |
|---|
- Amplio rango de voltaje de funcionamiento: 5,5 – 24 V 1
- Alta corriente de salida: hasta 12 A continuos (30 máximo) por motor
- Las salidas del motor se pueden combinar para suministrar hasta 24 A continuos (60 A máximo) a un solo motor
- Entradas compatibles con sistemas de 5 V y 3,3 V (el umbral lógico alto es de 2,1 V)
- Funcionamiento PWM de hasta 20 kHz, que es ultrasónico y permite un funcionamiento más silencioso del motor
- Salida de voltaje de detección de corriente proporcional a la corriente del motor (aprox.140 mV / A; solo activo mientras el puente H está funcionando)
- Los LED indicadores del motor muestran lo que están haciendo las salidas incluso cuando no hay ningún motor conectado
- Se puede usar con un clon de Arduino o Arduino (a través de encabezados de protección) u otras placas de microcontroladores (a través de un encabezado de 0.1 ″ en el lado izquierdo)
- Cuando se usa como escudo, la fuente de alimentación del motor también se puede usar para alimentar la base Arduino
- Las asignaciones de pines de Arduino se pueden personalizar si las asignaciones predeterminadas no son convenientes
- La biblioteca Arduino hace que sea fácil comenzar a usar esta placa como escudo del controlador del motor
- Guía de usuario detallada
- Protección de voltaje inverso hasta -16 V
- Conductores robustos:
- Puede sobrevivir a voltajes de entrada de hasta 41 V
- Apagado por subtensión y sobretensión
- Apagado térmico de lado alto y lado bajo
- Protección de corto a tierra y corto a Vcc
1 Si bien la protección contra sobretensión generalmente se activa a 27 V, puede dispararse a voltajes tan bajos como 24 V, por lo que no recomendamos usar este controlador de motor con baterías de 24 V, que superan significativamente los 24 V cuando están completamente cargadas. Si el escudo está configurado para alimentar un Arduino o un clon de Arduino, el voltaje de suministro debe cumplir con los requisitos de voltaje de entrada de ese Arduino.
Hardware incluido
 |
| Protector de controlador de motor Pololu dual VNH5019 para Arduino con hardware incluido. |
|---|
Esta placa de controlador de motor se envía con todas las piezas de montaje en superficie pobladas. Sin embargo, se requiere soldadura para el montaje de las piezas de orificio pasante incluidas. Se incluyen las siguientes piezas de orificio pasante:
- un cabezal hembra extendido / apilable 1 × 10 (para escudos Arduino)
- dos cabezales hembra extendidos / apilables 1 × 8 (para escudos Arduino)
- dos cabezales hembra extendidos / apilables 1 × 6 (para escudos Arduino)
- tres bloques de terminales de 2 pines de 5 mm (para potencia de placa y salidas de motor)
- Cabezal macho separable recto de 40 pines y 0,1 ″ (puede enviarse en varias piezas, como dos tiras de 20 pines)
Un “bloque 0.1 de cortocircuito también se incluye (para suministrar opcionalmente potencia escudo para Arduino).
Puede soldar los bloques de terminales a los seis orificios pasantes grandes para hacer las conexiones de alimentación del motor y del motor, o puede romper una sección de 12 × 1 de la tira del cabezal de 0.1 ″ y soldarla en los orificios pasantes más pequeños que bordean estos agujeros más grandes. Sin embargo, tenga en cuenta que los bloques de terminales solo tienen una capacidad nominal de 16 A, y cada par de clavijas del cabezal solo tiene una capacidad combinada de 6 A, por lo que para aplicaciones de mayor potencia, los cables gruesos deben soldarse directamente a la placa.
Cuando no use esta placa como un escudo Arduino, puede soldar los encabezados de 0.1 ″ a las conexiones lógicas a lo largo del lado izquierdo de la placa para permitir su uso con cables personalizados o placas de prueba sin soldadura , o puede soldar cables directamente a la placa para obtener más compacta instalaciones. Tenga en cuenta que el motor y las conexiones de alimentación del motor no deben realizarse a través de una placa de pruebas.
El controlador del motor incluye tres condensadores de potencia electrolítica de 47 uF y hay espacio para agregar condensadores adicionales (por ejemplo, para compensar cables de alimentación largos o aumentar la estabilidad de la fuente de alimentación). Por lo general, no se necesitan capacitores de potencia adicionales y no se incluyen capacitores adicionales con este controlador de motor.
Los dos orificios de montaje están diseñados para usarse con tornillos n. ° 4 (no incluidos). Tienen una separación horizontal de 0,30 ″ y una separación vertical de 1,70 ″.
No se incluye un Arduino .
Diagrama esquemático
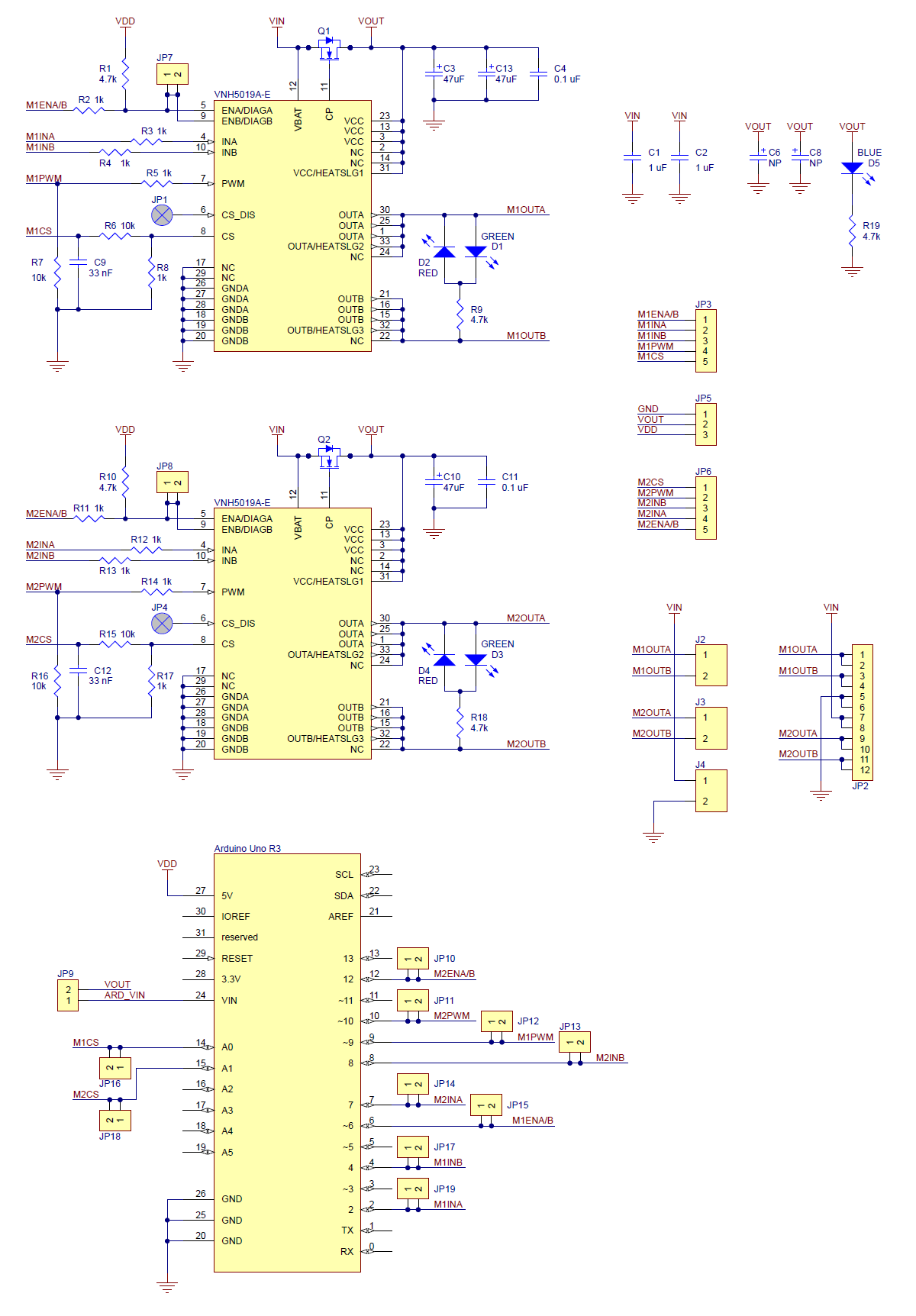 |
| Diagrama esquemático del protector de controlador de motor Pololu dual VNH5019 para Arduino. |
|---|
Consideración de la disipación de energía en el mundo real
Cada controlador de motor IC tiene una clasificación de corriente continua máxima de 30 A. Sin embargo, los chips por sí mismos se sobrecalentarán a corrientes más bajas (consulte la tabla anterior para conocer los valores típicos). La corriente real que puede suministrar dependerá de qué tan bien pueda mantener fríos los controladores del motor. La placa de circuito impreso del escudo está diseñada para extraer calor de los chips del controlador del motor, pero el rendimiento se puede mejorar agregando disipadores de calor. En nuestras pruebas, pudimos ofrecer duraciones cortas (del orden de milisegundos) de 30 A y varios segundos de 20 A sin sobrecalentamiento. A 6 A, el chip apenas se calienta al tacto. Para instalaciones de alta corriente, los cables del motor y de la fuente de alimentación también deben soldarse directamente en lugar de pasar por los bloques de terminales suministrados, que tienen una capacidad de hasta 16 A.
Este producto puede calentarse lo suficiente como para quemarlo mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Muchos controladores de motor o controladores de velocidad pueden tener valores nominales de corriente máxima que son sustancialmente más altos que los valores nominales de corriente continua; este no es el caso de estos controladores de motor, que tienen una clasificación continua de 30 A y una protección contra sobrecorriente que puede activarse a tan solo 30 A (50 A típico). Por lo tanto, la corriente de bloqueo de su motor no debe ser superior a 30 A. (Incluso si espera funcionar a una corriente promedio mucho más baja, el motor aún puede generar ráfagas cortas de altas corrientes, como cuando está arrancando, si es especial. no se toman medidas.)
Salidas de detección de corriente
Los voltajes en los pines M1CS y M2CS son aproximadamente iguales a 140 mV por amperio de corriente de salida del motor correspondiente. Las lecturas de los sentidos actuales son más precisas a corrientes más altas. Tenga en cuenta que la salida solo está activa mientras el puente H está funcionando; está inactivo (bajo) cuando el conductor está frenando (las salidas del motor son de alta impedancia) o frenando. Durante la parte de inercia del ciclo de conducción / inercia, la corriente seguirá circulando a través del motor, pero el voltaje en el pin FB no reflejará con precisión la corriente del motor.
Los pines de salida de detección de corriente están diseñados para frecuencias PWM de 5 kHz o más. Si utiliza una frecuencia PWM inferior a 5 kHz y desea medir la corriente, le recomendamos que agregue un condensador adicional entre el pin de salida de detección de corriente y GND para suavizar la señal. Por ejemplo, si usa una frecuencia PWM de 490 Hz y desea medir la corriente de M1, debe agregar un capacitor de 1 µF (o más grande) entre M1CS y GND.
Tenga en cuenta que, si bien los voltajes M1CS y M2CS pueden exceder potencialmente los 3,3 V a corrientes altas, el circuito de detección de corriente debe ser seguro para su uso con muchas entradas analógicas de 3,3 V. La mayoría de las MCU tienen diodos de protección integrados que fijarán el voltaje de entrada a un valor seguro, y dado que el circuito CS tiene una resistencia de 10 kΩ en serie con la salida, solo unos pocos cientos de microamperios como máximo fluirán a través de ese diodo.



Valoraciones
No hay valoraciones aún.